-
1 communications failure
1) Военный термин: нарушение связи, перебой в связи2) Аварийное восстановление: отказ системы связи (Незапланированное прекращение связи между процессорами или процессором и периферийным устройством в результате отказа программного обеспечения, технических средств или аппаратуры связи)Универсальный англо-русский словарь > communications failure
-
2 centralized UPS
ИБП для централизованных систем питания
ИБП для централизованного питания нагрузок
-
[Интент]ИБП для централизованных систем питания
А. П. Майоров
Для многих предприятий всесторонняя защита данных имеет жизненно важное значение. Кроме того, есть виды деятельности, в которых прерывания подачи электроэнергии не допускаются даже на доли секунды. Так работают расчетные центры банков, больницы, аэропорты, центры обмена трафиком между различными сетями. В такой же степени критичны к электропитанию телекоммуникационное оборудование, крупные узлы Интернет, число ежедневных обращений к которым исчисляется десятками и сотнями тысяч. Третья часть обзора по ИБП посвящена оборудованию, предназначенному для обеспечения питания особо важных объектов.
Централизованные системы бесперебойного питания применяют в тех случаях, когда прерывание подачи электроэнергии недопустимо для работы большинства единиц оборудования, составляющих одну информационную или технологическую систему. Как правило, проблемы питания рассматривают в рамках единого проекта наряду со многими другими подсистемами здания, поскольку они требуют вложения значительных средств и увязки с силовой электропроводкой, коммутационным электрооборудованием и аппаратурой кондиционирования. Изначально системы бесперебойного питания рассчитаны на долгие годы эксплуатации, их срок службы можно сравнить со сроком службы кабельных подсистем здания и основного компьютерного оборудования. За 15—20 лет функционирования предприятия оснащение его рабочих станций обновляется три-четыре раза, несколько раз изменяется планировка помещений и производится их ремонт, но все эти годы система бесперебойного питания должна работать безотказно. Для ИБП такого класса долговечность превыше всего, поэтому в их технических спецификациях часто приводят значение важнейшего технического показателя надежности — среднего времени наработки на отказ (Mean Time Before Failure — MTBF). Во многих моделях с ИБП оно превышает 100 тыс. ч, в некоторых из них достигает 250 тыс. ч (т. е. 27 лет непрерывной работы). Правда, сравнивая различные системы, нужно учитывать условия, для которых этот показатель задан, и к предоставленным цифрам относиться осторожно, поскольку условия работы оборудования разных производителей неодинаковы.
Батареи аккумуляторов
К сожалению, наиболее дорогостоящий компонент ИБП — батарея аккумуляторов так долго работать не может. Существует несколько градаций качества батарей, которые различаются сроком службы и, естественно, ценой. В соответствии с принятой два года назад конвенцией EUROBAT по среднему сроку службы батареи разделены на четыре группы:
10+ — высоконадежные,
10 — высокоэффективные,
5—8 — общего назначения,
3—5 — стандартные коммерческие.Учитывая исключительно жесткую конкуренцию на рынке ИБП малой мощности, производители стремятся снизить до минимума начальную стоимость своих моделей, поэтому часто комплектуют их самыми простыми батареями. Применительно к этой группе продуктов такой подход оправдан, поскольку упрощенные ИБП изымают из обращения вместе с защищаемыми ими персональными компьютерами. Впервые вступающие на этот рынок производители, пытаясь оттеснить конкурентов, часто используют в своих интересах неосведомленность покупателей о проблеме качества батарей и предлагают им сравнимые по остальным показателям модели за более низкую цену. Имеются случаи, когда партнеры крупной фирмы комплектуют ее проверенные временем и признанные рынком модели ИБП батареями, произведенными в развивающихся странах, где контроль за технологическим процессом ослаблен, а, значит, срок службы батарей меньше по сравнению с "кондиционными" изделиями. Поэтому, подбирая для себя ИБП, обязательно поинтересуйтесь качеством батареи и ее производителем, избегайте продукции неизвестных фирм. Следование этим рекомендациям сэкономит вам значительные средства при эксплуатации ИБП.
Все сказанное еще в большей степени относится к ИБП высокой мощности. Как уже отмечалось, срок службы таких систем исчисляется многими годами. И все же за это время приходится несколько раз заменять батареи. Как это ни покажется странным, но расчеты, основанные на ценовых и качественных параметрах батарей, показывают, что в долгосрочной перспективе наиболее выгодны именно батареи высшего качества, несмотря на их первоначальную стоимость. Поэтому, имея возможность выбора, устанавливайте батареи только "высшей пробы". Гарантированный срок службы таких батарей приближается к 15 годам.
Не менее важный аспект долговечности мощных систем бесперебойного питания — условия эксплуатации аккумуляторных батарей. Чтобы исключить непредсказуемые, а следовательно, часто приводящие к аварии перерывы в подаче электропитания, абсолютно все включенные в приведенную в статье таблицу модели оснащены самыми совершенными схемами контроля за состоянием батарей. Не мешая выполнению основной функции ИБП, схемы мониторинга, как правило, контролируют следующие параметры батареи: зарядный и разрядный токи, возможность избыточного заряда, рабочую температуру, емкость.
Кроме того, с их помощью рассчитываются такие переменные, как реальное время автономной работы, конечное напряжение зарядки в зависимости от реальной температуры внутри батареи и др.
Подзарядка батареи происходит по мере необходимости и в наиболее оптимальном режиме для ее текущего состояния. Когда емкость батареи снижается ниже допустимого предела, система контроля автоматически посылает предупреждающий сигнал о необходимости ее скорой замены.
Топологические изыски
Долгое время специалисты по системам электропитания руководствовались аксиомой, что мощные системы бесперебойного питания должны иметь топологию on-line. Считается, что именно такая топология гарантирует защиту от всех нарушений на линиях силового питания, позволяет фильтровать помехи во всем частотном диапазоне, обеспечивает на выходе чистое синусоидальное напряжение с номинальными параметрами. Однако за качество электропитания приходится платить повышенным выделением тепловой энергии, сложностью электронных схем, а следовательно, потенциальным снижением надежности. Но, несмотря на это, за многолетнюю историю выпуска мощных ИБП были разработаны исключительно надежные аппараты, способные работать в самых невероятных условиях, когда возможен отказ одного или даже нескольких узлов одновременно. Наиболее важным и полезным элементом мощных ИБП является так называемый байпас. Это обходной путь подачи энергии на выход в случае ремонтных и профилактических работ, вызванных отказом некоторых компонентов систем или возникновением перегрузки на выходе. Байпасы бывают ручными и автоматическими. Они формируются несколькими переключателями, поэтому для их активизации требуется некоторое время, которое инженеры постарались снизить до минимума. И раз уж такой переключатель был создан, то почему бы не использовать его для снижения тепловыделения в то время, когда питающая сеть пребывает в нормальном рабочем состоянии. Так появились первые признаки отступления от "истинного" режима on-line.
Новая топология отдаленно напоминает линейно-интерактивную. Устанавливаемый пользователем системы порог срабатывания определяет момент перехода системы в так называемый экономный режим. При этом напряжение из первичной сети поступает на выход системы через байпас, однако электронная схема постоянно следит за состоянием первичной сети и в случае недопустимых отклонений мгновенно переключается на работу в основном режиме on-line.
Подобная схема применена в ИБП серии Synthesis фирмы Chloride (Сети и системы связи, 1996. № 10. С. 131), механизм переключения в этих устройствах назван "интеллектуальным" ключом. Если качество входной линии укладывается в пределы, определяемые самим пользователем системы, аппарат работает в линейно-интерактивном режиме. При достижении одним из контролируемых параметров граничного значения система начинает работать в нормальном режиме on-line. Конечно, в этом режиме система может работать и постоянно.
За время эксплуатации системы отход от исходной аксиомы позволяет экономить весьма значительные средства за счет сокращения тепловыделения. Сумма экономии оказывается сопоставимой со стоимостью оборудования.
Надо отметить, что от своих исходных принципов отошла еще одна фирма, ранее выпускавшая только линейно-интерактивные ИБП и ИБП типа off-line сравнительно небольшой мощности. Теперь она превысила прежний верхний предел мощности своих ИБП (5 кВА) и построила новую систему по топологии on-line. Я имею в виду фирму АРС и ее массив электропитания Simmetra (Сети и системы связи. 1997. № 4. С. 132). Создатели попытались заложить в систему питания те же принципы повышения надежности, которые применяют при построении особо надежной компьютерной техники. В модульную конструкцию введена избыточность по отношению к управляющим модулям и батареям. В любом из трех выпускаемых шасси из отдельных модулей можно сформировать нужную на текущий момент систему и в будущем наращивать ее по мере надобности. Суммарная мощность самого большого шасси достигает 16 кВА. Еще рано сравнивать эту только что появившуюся систему с другими включенными в таблицу. Однако факт появления нового продукта в этом исключительно устоявшемся секторе рынка сам по себе интересен.
Архитектура
Суммарная выходная мощность централизованных систем бесперебойного питания может составлять от 10—20 кВА до 200—300 МВА и более. Соответственно видоизменяется и структура систем. Как правило, она включают в себя несколько источников, соединенных параллельно тем или иным способом. Аппаратные шкафы устанавливают в специально оборудованных помещениях, где уже находятся распределительные шкафы выходного напряжения и куда подводят мощные входные силовые линии электропитания. В аппаратных помещениях поддерживается определенная температура, а за функционированием оборудования наблюдают специалисты.
Многие реализации системы питания для достижения необходимой надежности требуют совместной работы нескольких ИБП. Существует ряд конфигураций, где работают сразу несколько блоков. В одних случаях блоки можно добавлять постепенно, по мере необходимости, а в других — системы приходится комплектовать в самом начале проекта.
Для повышения суммарной выходной мощности используют два варианта объединения систем: распределенный и централизованный. Последний обеспечивает более высокую надежность, но первый более универсален. Блоки серии EDP-90 фирмы Chloride допускают объединение двумя способами: и просто параллельно (распределенный вариант), и с помощью общего распределительного блока (централизованный вариант). При выборе способа объединения отдельных ИБП необходим тщательный анализ структуры нагрузки, и в этом случае лучше всего обратиться за помощью к специалистам.
Применяют параллельное соединение блоков с централизованным байпасом, которое используют для повышения общей надежности или увеличения общей выходной мощности. Число объединяемых блоков не должно превышать шести. Существуют и более сложные схемы с избыточностью. Так, например, чтобы исключить прерывание подачи питания во время профилактических и ремонтных работ, соединяют параллельно несколько блоков с подключенными к отдельному ИБП входными линиями байпасов.
Особо следует отметить сверхмощные ИБП серии 3000 фирмы Exide. Суммарная мощность системы питания, построенная на модульных элементах этой серии, может достигать нескольких миллионов вольт-ампер, что сравнимо с номинальной мощностью генераторов некоторых электростанций. Все компоненты серии 3000 без исключения построены на модульном принципе. На их основе можно создать особо мощные системы питания, в точности соответствующие исходным требованиям. В процессе эксплуатации суммарную мощность систем можно наращивать по мере увеличения нагрузки. Однако следует признать, что систем бесперебойного питания такой мощности в мире не так уж много, их строят по специальным контрактам. Поэтому серия 3000 не включена в общую таблицу. Более подробные данные о ней можно получить на Web-узле фирмы Exide по адресу http://www.exide.com или в ее московском представительстве.
Важнейшие параметры
Для систем с высокой выходной мощностью очень важны показатели, которые для менее мощных систем не имеют первостепенного значения. Это, например, КПД — коэффициент полезного действия (выражается либо действительным числом меньше единицы, либо в процентах), показывающий, какая часть активной входной мощности поступает к нагрузке. Разница значений входной и выходной мощности рассеивается в виде тепла. Чем выше КПД, тем меньше тепловой энергии выделяется в аппаратной комнате и, значит, для поддержания нормальных рабочих условий требуется менее мощная система кондиционирования.
Чтобы представить себе, о каких величинах идет речь, рассчитаем мощность, "распыляемую" ИБП с номинальным значением на выходе 8 МВт и с КПД, равным 95%. Такая система будет потреблять от первичной силовой сети 8,421 МВт — следовательно, превращать в тепло 0,421 МВт или 421 кВт. При повышении КПД до 98% при той же выходной мощности рассеиванию подлежат "всего" 163 кВт. Напомним, что в данном случае нужно оперировать активными мощностями, измеряемыми в ваттах.
Задача поставщиков электроэнергии — подавать требуемую мощность ее потребителям наиболее экономным способом. Как правило, в цепях переменного тока максимальные значения напряжения и силы тока из-за особенностей нагрузки не совпадают. Из-за этого смещения по фазе снижается эффективность доставки электроэнергии, поскольку при передаче заданной мощности по линиям электропередач, через трансформаторы и прочие элементы систем протекают токи большей силы, чем в случае отсутствия такого смещения. Это приводит к огромным дополнительным потерям энергии, возникающим по пути ее следования. Степень сдвига по фазе измеряется не менее важным, чем КПД, параметром систем питания — коэффициентом мощности.
Во многих странах мира существуют нормы на допустимое значение коэффициента мощности систем питания и тарифы за электроэнергию нередко зависят от коэффициента мощности потребителя. Суммы штрафов за нарушение нормы оказываются настольно внушительными, что приходится заботиться о повышении коэффициента мощности. С этой целью в ИБП встраивают схемы, которые компенсируют сдвиг по фазе и приближают значение коэффициента мощности к единице.
На распределительную силовую сеть отрицательно влияют и нелинейные искажения, возникающие на входе блоков ИБП. Почти всегда их подавляют с помощью фильтров. Однако стандартные фильтры, как правило, уменьшают искажения только до уровня 20—30%. Для более значительного подавления искажений на входе систем ставят дополнительные фильтры, которые, помимо снижения величины искажений до нескольких процентов, повышают коэффициент мощности до 0,9—0,95. С 1998 г. встраивание средств компенсации сдвига по фазе во все источники электропитания компьютерной техники в Европе становится обязательным.
Еще один важный параметр мощных систем питания — уровень шума, создаваемый такими компонентами ИБП, как, например, трансформаторы и вентиляторы, поскольку их часто размещают вместе в одном помещении с другим оборудованием — там где работает и персонал.
Чтобы представить себе, о каких значениях интенсивности шума идет речь, приведем для сравнения такие примеры: уровень шума, производимый шелестом листвы и щебетанием птиц, равен 40 дБ, уровень шума на центральной улице большого города может достигать 80 дБ, а взлетающий реактивный самолет создает шум около 100 дБ.
Достижения в электронике
Мощные системы бесперебойного электропитания выпускаются уже более 30 лет. За это время бесполезное тепловыделение, объем и масса их сократились в несколько раз. Во всех подсистемах произошли и значительные технологические изменения. Если раньше в инверторах использовались ртутные выпрямители, а затем кремниевые тиристоры и биполярные транзисторы, то теперь в них применяются высокоскоростные мощные биполярные транзисторы с изолированным затвором (IGBT). В управляющих блоках аналоговые схемы на дискретных компонентах сначала были заменены на цифровые микросхемы малой степени интеграции, затем — микропроцессорами, а теперь в них установлены цифровые сигнальные процессоры (Digital Signal Processor — DSP).
В системах питания 60-х годов для индикации их состояния использовались многочисленные аналоговые измерительные приборы. Позднее их заменили более надежными и информативными цифровыми панелями из светоизлучающих диодов и жидкокристаллических индикаторов. В наше время повсеместно используют программное управление системами питания.
Еще большее сокращение тепловых потерь и общей массы ИБП дает замена массивных трансформаторов, работающих на частоте промышленной сети (50 или 60 Гц), высокочастотными трансформаторами, работающими на ультразвуковых частотах. Между прочим, высокочастотные трансформаторы давно применяются во внутренних источниках питания компьютеров, а вот в ИБП их стали устанавливать сравнительно недавно. Применение IGBT-приборов позволяет строить и бестрансформаторные инверторы, при этом внутреннее построение ИБП существенно меняется. Два последних усовершенствования применены в ИБП серии Synthesis фирмы Chloride, отличающихся уменьшенным объемом и массой.
Поскольку электронная начинка ИБП становится все сложнее, значительную долю их внутреннего объема теперь занимают процессорные платы. Для радикального уменьшения суммарной площади плат и изоляции их от вредных воздействий электромагнитных полей и теплового излучения используют электронные компоненты для так называемой технологии поверхностного монтажа (Surface Mounted Devices — SMD) — той самой, которую давно применяют в производстве компьютеров. Для защиты электронных и электротехнических компонентов имеются специальные внутренние экраны.
***
Со временем серьезный системный подход к проектированию материальной базы предприятия дает значительную экономию не только благодаря увеличению срока службы всех компонентов "интегрированного интеллектуального" здания, но и за счет сокращения расходов на электроэнергию и текущее обслуживание. Использование централизованных систем бесперебойного питания в пересчете на стоимость одного рабочего места дешевле, чем использование маломощных ИБП для рабочих станций и даже ИБП для серверных комнат. Однако, чтобы оценить это, нужно учесть все факторы установки таких систем.
Предположим, что предприятие свое помещение арендует. Тогда нет никакого смысла разворачивать дорогостоящую систему централизованного питания. Если через пять лет руководство предприятия не намерено заниматься тем же, чем занимается сегодня, то даже ИБП для серверных комнат обзаводиться нецелесообразно. Но если оно рассчитывает на то, что производство будет держаться на плаву долгие годы и решило оснастить принадлежащее им здание системой бесперебойного питания, то для выбора такой системы нужно воспользоваться услугами специализированных фирм. Сейчас их немало и в России. От этих же фирм можно получить информацию о так называемых системах гарантированного электропитания, в которые включены дизельные электрогенераторы и прочие, более экзотические источники энергии.
Нам же осталось рассмотреть лишь методы управления ИБП, что мы и сделаем в одном из следующих номеров нашего журнала
[ http://www.ccc.ru/magazine/depot/97_07/read.html?0502.htm]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > centralized UPS
-
3 LED
светодиод
Полупроводниковый прибор, преобразующий электрическую энергию в энергию оптического излучения на основе явления инжекционной электролюминесценции в полупроводниковом кристалле с электронно-дырочным переходом, полупроводниковым гетеропереходом, либо контактом металл-полупроводник.
[ ГОСТ 24453-80]
светоизлучающий диод
(светодиод)
Устройство, включающее в себя p-n переход, испускающее световое излучение при прохождении через него электрического тока
(МЭС 845-04-40).
[ ГОСТ Р МЭК 60073-2000]
светоизлучающий диод
СИД
Полупроводниковый диод, излучающий энергию в видимой области спектра в результате рекомбинации электронов и дырок.
[ ГОСТ 15133-77]Тематики
- измерение лазерного излучения
- полупроводниковые приборы
- электротехника, основные понятия
Синонимы
EN
DE
светодиодный индикатор
-
[Интент]
Установленные на плате четыре светодиодных индикатора
Тематики
- электротехника, основные понятия
EN
LED
Светоизлучающий диод
Источник: ГОСТ Р МЭК 61850-7-4-2011: Сети и системы связи на подстанциях. Часть 7. Базовая структура связи для подстанций и линейного оборудования. Раздел 4. Совместимые классы логических узлов и классы данных оригинал документа
01.05.24 модель расширенного канала [ extended channel model]: Система кодирования и передачи как байтов с данными сообщения, так и управляющей информации о сообщении, в пределах которой декодер работает в режиме расширенного канала.
Примечание - Управляющая информация передается с использованием управляющих последовательностей интерпретации в расширенном канале (ECI).
<2>4 Сокращения1)
1)Следует учитывать, что в соответствии с оригиналом ИСО/МЭК 19762-1 в данном разделе присутствует сокращение CSMA/CD, которое в тексте стандарта не используется.
Кроме того, сокращения отсортированы в алфавитном порядке.
Al
Идентификатор применения [application identifier]
ANS
Американский национальный стандарт [American National Standard]
ANSI
Американский национальный институт стандартов [American National Standards Institute]
ASC
Аккредитованный комитет по стандартам [Accredited Standards Committee]
вес
Контрольный знак блока [block check character]
BCD
Двоично-десятичный код (ДДК) [binary coded decimal]
BER
Коэффициент ошибок по битам [bit error rate]
CRC
Контроль циклическим избыточным кодом [cyclic redundancy check]
CSMA/CD
Коллективный доступ с контролем несущей и обнаружением конфликтов [carrier sense multiple access with collision detection network]
CSUM
Контрольная сумма [check sum]
Dl
Идентификатор данных [data identifier]
ECI
Интерпретация в расширенном канале [extended channel interpretation]
EDI
Электронный обмен данными (ЭОД) [electronic data interchange]
EEPROM
Электрически стираемое программируемое постоянное запоминающее устройство [electrically erasable programmable read only memory]
HEX
Шестнадцатеричная система счисления [hexadecimal]
INCITS
Международный комитет по стандартам информационных технологий [International Committee for Information Technology Standards]
LAN
Локальная вычислительная сеть [local area network]
Laser
Усиление света с помощью вынужденного излучения [light amplification by the stimulated emission of radiation]
LED
Светоизлучающий диод [light emitting diode]
LLC
Управление логической связью [logical link control]
LSB
Младший значащий бит [least significant bit]
МНЮ
Аккредитованный комитет по отраслевым стандартам в сфере обработки грузов [Accredited Standards Committee for the Material Handling Industry]
MSB
Старший значащий бит [most significant bit]
MTBF
Средняя наработка на отказ [mean time between failures]
MTTR
Среднее время ремонта [mean time to repair]
NRZ
Без возвращения к нулю [non-return to zero code]
NRZ Space
Кодирование без возвращения к нулю с перепадом на нулях [non-return to zero-space]
NRZ-1
Кодирование без возвращения к нулю с перепадом на единицах [non-return to zero invert on ones]
NRZ-M
Запись без возвращения к нулю (метка) [non-return to zero (mark) recording]
RTI
Возвратное транспортное упаковочное средство [returnable transport item]
RZ
Кодирование с возвратом к нулю [return to zero]
VLD
Светоизлучающий лазерный диод [visible laser diode]
<2>Библиография
[1]
ИСО/МЭК Руководство 2
Стандартизация и связанная с ней деятельность. Общий словарь
(ISO/IECGuide2)
(Standardization and related activities - General vocabulary)
[2]
ИСО/МЭК 2382-1
Информационные технологии. Словарь - Часть 1. Основные термины
(ISO/IEC 2382-1)
(Information technology - Vocabulary - Part 1: Fundamental terms)
[3]
ИСО/МЭК 2382-4
Информационные технологии. Словарь - Часть 4. Организация данных
(ISO/IEC 2382-4)
(Information technology - Vocabulary - Part 4: Organization of data)
[4]
ИСО/МЭК 2382-9
Информационные технологии. Словарь. Часть 9. Передача данных
(ISO/IEC 2382-9)
(Information technology - Vocabulary - Part 9: Data communication)
[5]
ИСО/МЭК 2382-16
Информационные технологии. Словарь. Часть 16. Теория информации
(ISO/IEC 2382-16)
(Information technology - Vocabulary - Part 16: Information theory)
[6]
ИСО/МЭК 19762-2
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 2. Оптические носители данных (ОНД)
(ISO/IEC 19762-2)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 2: Optically readable media (ORM))
[7]
ИСО/МЭК 19762-3
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 3. Радиочастотная идентификация (РЧИ)
(ISO/IEC 19762-3)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 3: Radio frequency identification (RFID)
[8]
ИСО/МЭК 19762-4
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Основные термины в области радиосвязи
(ISO/IEC 19762-4)
(Information technology-Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 4: General terms relating to radio communications)
[9]
ИСО/МЭК 19762-5
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 5. Системы определения места нахождения
(ISO/IEC 19762-5)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 5: Locating systems)
[10]
МЭК 60050-191
Международный Электротехнический Словарь. Глава 191. Надежность и качество услуг
(IEC 60050-191)
(International Electrotechnical Vocabulary - Chapter 191: Dependability and quality of Service)
[11]
МЭК 60050-702
Международный Электротехнический Словарь. Глава 702. Колебания, сигналы и соответствующие устройства
(IEC 60050-702)
(International Electrotechnical Vocabulary - Chapter 702: Oscillations, signals and related devices)
[12]
МЭК 60050-704
Международный Электротехнический словарь. Глава 704. Техника передачи
(IEC 60050-704)
(International Electrotechnical Vocabulary. Chapter 704: Transmission)
[13]
МЭК 60050-845
Международный электротехнический словарь. Глава 845. Освещение
(IEC 60050-845)
(International Electrotechnical Vocabulary - Chapter 845: Lighting)
<2>
Источник: ГОСТ Р ИСО/МЭК 19762-1-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АИСД оригинал документа
Англо-русский словарь нормативно-технической терминологии > LED
-
4 switching technology
технология коммутации
-
[Интент]Современные технологии коммутации
[ http://www.xnets.ru/plugins/content/content.php?content.84]Статья подготовлена на основании материалов опубликованных в журналах "LAN", "Сети и системы связи", в книге В.Олифер и Н.Олифер "Новые технологии и оборудование IP-сетей", на сайтах www.citforum.ru и опубликована в журнале "Компьютерные решения" NN4-6 за 2000 год.
- Введение
- Коммутация первого уровня.
- Коммутация второго уровня.
- Коммутация третьего уровня.
- Коммутация четвертого уровня.
- Критерии выбора оборудования, физическая и логическая структура сети
- Качество обслуживания (QoS) и принципы задания приоритетов
- Заключение
Введение
На сегодня практически все организации, имеющие локальные сети, остановили свой выбор на сетях типа Ethernet. Данный выбор оправдан тем, что начало внедрения такой сети сопряжено с низкой стоимостью и простотой реализации, а развитие - с хорошей масштабируемостью и экономичностью.
Бросив взгляд назад - увидим, что развитие активного оборудования сетей шло в соответствии с требованиями к полосе пропускания и надежности. Требования, предъявляемые к большей надежности, привели к отказу от применения в качестве среды передачи коаксиального кабеля и перевода сетей на витую пару. В результате такого перехода отказ работы соединения между одной из рабочих станций и концентратором перестал сказываться на работе других рабочих станций сети. Но увеличения производительности данный переход не принес, так как концентраторы используют разделяемую (на всех пользователей в сегменте) полосу пропускания. По сути, изменилась только физическая топология сети - с общей шины на звезду, а логическая топология по-прежнему осталась - общей шиной.
Дальнейшее развитие сетей шло по нескольким путям:- увеличение скорости,
- внедрение сегментирования на основе коммутации,
- объединение сетей при помощи маршрутизации.
Увеличение скорости при прежней логической топологии - общая шина, привело к незначительному росту производительности в случае большого числа портов.
Большую эффективность в работе сети принесло сегментирование сетей с использованием технология коммутации пакетов. Коммутация наиболее действенна в следующих вариантах:
Вариант 1, именуемый связью "многие со многими" – это одноранговые сети, когда одновременно существуют потоки данных между парами рабочих станций. При этом предпочтительнее иметь коммутатор, у которого все порты имеют одинаковую скорость, (см. Рисунок 1).
Вариант 2, именуемый связью "один со многими" – это сети клиент-сервер, когда все рабочие станции работают с файлами или базой данных сервера. В данном случае предпочтительнее иметь коммутатор, у которого порты для подключения рабочих станций имеют одинаковую небольшую скорость, а порт, к которому подключается сервер, имеет большую скорость,(см. Рисунок 2).

Когда компании начали связывать разрозненные системы друг с другом, маршрутизация обеспечивала максимально возможную целостность и надежность передачи трафика из одной сети в другую. Но с ростом размера и сложности сети, а также в связи со все более широким применением коммутаторов в локальных сетях, базовые маршрутизаторы (зачастую они получали все данные, посылаемые коммутаторами) стали с трудом справляться со своими задачами.
Проблемы с трафиком, связанные с маршрутизацией, проявляются наиболее остро в средних и крупных компаниях, а также в деятельности операторов Internet, так как они вынуждены иметь дело с большими объемами IP-трафика, причем этот трафик должен передаваться своевременно и эффективно.
С подключением настольных систем непосредственно к коммутаторам на 10/100 Мбит/с между ними и магистралью оказывается все меньше промежуточных устройств. Чем выше скорость подключения настольных систем, тем более скоростной должна быть магистраль. Кроме того, на каждом уровне устройства должны справляться с приходящим трафиком, иначе возникновения заторов не избежать.
Рассмотрению технологий коммутации и посвящена данная статья.Коммутация первого уровня
Термин "коммутация первого уровня" в современной технической литературе практически не описывается. Для начала дадим определение, с какими характеристиками имеет дело физический или первый уровень модели OSI:
физический уровень определяет электротехнические, механические, процедурные и функциональные характеристики активации, поддержания и дезактивации физического канала между конечными системами. Спецификации физического уровня определяют такие характеристики, как уровни напряжений, синхронизацию изменения напряжений, скорость передачи физической информации, максимальные расстояния передачи информации, физические соединители и другие аналогичные характеристики.
Смысл коммутации на первом уровне модели OSI означает физическое (по названию уровня) соединение. Из примеров коммутации первого уровня можно привести релейные коммутаторы некоторых старых телефонных и селекторных систем. В более новых телефонных системах коммутация первого уровня применяется совместно с различными способами сигнализации вызовов и усиления сигналов. В сетях передачи данных данная технология применяется в полностью оптических коммутаторах.Коммутация второго уровня
Рассматривая свойства второго уровня модели OSI и его классическое определение, увидим, что данному уровню принадлежит основная доля коммутирующих свойств.
Определение. Канальный уровень (формально называемый информационно-канальным уровнем) обеспечивает надежный транзит данных через физический канал. Канальный уровень решает вопросы физической адресации (в противоположность сетевой или логической адресации), топологии сети, линейной дисциплины (каким образом конечной системе использовать сетевой канал), уведомления о неисправностях, упорядоченной доставки блоков данных и управления потоком информации.
На самом деле, определяемая канальным уровнем модели OSI функциональность служит платформой для некоторых из сегодняшних наиболее эффективных технологий. Большое значение функциональности второго уровня подчеркивает тот факт, что производители оборудования продолжают вкладывать значительные средства в разработку устройств с такими функциями.
С технологической точки зрения, коммутатор локальных сетей представляет собой устройство, основное назначение которого - максимальное ускорение передачи данных за счет параллельно существующих потоков между узлами сети. В этом - его главное отличие от других традиционных устройств локальных сетей – концентраторов (Hub), предоставляющих всем потокам данных сети всего один канал передачи данных.
Коммутатор позволяет передавать параллельно несколько потоков данных c максимально возможной для каждого потока скоростью. Эта скорость ограничена физической спецификацией протокола, которую также часто называют "скоростью провода". Это возможно благодаря наличию в коммутаторе большого числа центров обработки и продвижения кадров и шин передачи данных.
Коммутаторы локальных сетей в своем основном варианте, ставшем классическим уже с начала 90-х годов, работают на втором уровне модели OSI, применяя свою высокопроизводительную параллельную архитектуру для продвижения кадров канальных протоколов. Другими словами, ими выполняются алгоритмы работы моста, описанные в стандартах IEEE 802.1D и 802.1H. Также они имеют и много других дополнительных функций, часть которых вошла в новую редакцию стандарта 802.1D-1998, а часть остается пока не стандартизованной.
Коммутаторы ЛВС отличаются большим разнообразием возможностей и, следовательно, цен - стоимость 1 порта колеблется в диапазоне от 50 до 1000 долларов. Одной из причин столь больших различий является то, что они предназначены для решения различных классов задач. Коммутаторы высокого класса должны обеспечивать высокую производительность и плотность портов, а также поддерживать широкий спектр функций управления. Простые и дешевые коммутаторы имеют обычно небольшое число портов и не способны поддерживать функции управления. Одним из основных различий является используемая в коммутаторе архитектура. Поскольку большинство современных коммутаторов работают на основе патентованных контроллеров ASIC, устройство этих микросхем и их интеграция с остальными модулями коммутатора (включая буферы ввода-вывода) играет важнейшую роль. Контроллеры ASIC для коммутаторов ЛВС делятся на 2 класса - большие ASIC, способные обслуживать множество коммутируемых портов (один контроллер на устройство) и небольшие ASIC, обслуживающие по несколько портов и объединяемые в матрицы коммутации.
Существует 3 варианта архитектуры коммутаторов:
- переключение (cross-bar) с буферизацией на входе,
- самомаршрутизация (self-route) с разделяемой памятью
- высокоскоростная шина.
На рисунке 3 показана блок-схема коммутатора с архитектурой, используемой для поочередного соединения пар портов. В любой момент такой коммутатор может обеспечить организацию только одного соединения (пара портов). При невысоком уровне трафика не требуется хранение данных в памяти перед отправкой в порт назначения - такой вариант называется коммутацией на лету cut-through. Однако, коммутаторы cross-bar требуют буферизации на входе от каждого порта, поскольку в случае использования единственно возможного соединения коммутатор блокируется (рисунок 4). Несмотря на малую стоимость и высокую скорость продвижения на рынок, коммутаторы класса cross-bar слишком примитивны для эффективной трансляции между низкоскоростными интерфейсами Ethernet или token ring и высокоскоростными портами ATM и FDDI.


Коммутаторы с разделяемой памятью имеют общий входной буфер для всех портов, используемый как внутренняя магистраль устройства (backplane). Буферизагия данных перед их рассылкой (store-and-forward - сохранить и переслать) приводит к возникновению задержки. Однако, коммутаторы с разделяемой памятью, как показано на рисунке 5 не требуют организации специальной внутренней магистрали для передачи данных между портами, что обеспечивает им более низкую цену по сравнению с коммутаторами на базе высокоскоростной внутренней шины.

На рисунке 6 показана блок-схема коммутатора с высокоскоростной шиной, связывающей контроллеры ASIC. После того, как данные преобразуются в приемлемый для передачи по шине формат, они помещаются на шину и далее передаются в порт назначения. Поскольку шина может обеспечивать одновременную (паралельную) передачу потока данных от всех портов, такие коммутаторы часто называют "неблокируемыми" (non-blocking) - они не создают пробок на пути передачи данных.

Применение аналогичной параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня модели OSI.
Коммутация третьего уровня
В продолжении темы о технологиях коммутации рассмотренных в предыдущем номера повторим, что применение параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня. Это позволило существенно, в 10-100 раз повысить скорость маршрутизации по сравнению с традиционными маршрутизаторами, в которых один центральный универсальный процессор выполняет программное обеспечение маршрутизации.
По определению Сетевой уровень (третий) - это комплексный уровень, который обеспечивает возможность соединения и выбор маршрута между двумя конечными системами, подключенными к разным "подсетям", которые могут находиться в разных географических пунктах. В данном случае "подсеть" это, по сути, независимый сетевой кабель (иногда называемый сегментом).
Коммутация на третьем уровне - это аппаратная маршрутизация. Традиционные маршрутизаторы реализуют свои функции с помощью программно-управляемых процессоров, что будем называть программной маршрутизацией. Традиционные маршрутизаторы обычно продвигают пакеты со скоростью около 500000 пакетов в секунду. Коммутаторы третьего уровня сегодня работают со скоростью до 50 миллионов пакетов в секунду. Возможно и дальнейшее ее повышение, так как каждый интерфейсный модуль, как и в коммутаторе второго уровня, оснащен собственным процессором продвижения пакетов на основе ASIC. Так что наращивание количества модулей ведет к наращиванию производительности маршрутизации. Использование высокоскоростной технологии больших заказных интегральных схем (ASIC) является главной характеристикой, отличающей коммутаторы третьего уровня от традиционных маршрутизаторов. Коммутаторы 3-го уровня делятся на две категории: пакетные (Packet-by-Packet Layer 3 Switches, PPL3) и сквозные (Cut-Through Layer 3 Switches, CTL3). PPL3 - означает просто быструю маршрутизацию (Рисунок_7). CTL3 – маршрутизацию первого пакета и коммутацию всех остальных (Рисунок 8).

У коммутатора третьего уровня, кроме реализации функций маршрутизации в специализированных интегральных схемах, имеется несколько особенностей, отличающих их от традиционных маршрутизаторов. Эти особенности отражают ориентацию коммутаторов 3-го уровня на работу, в основном, в локальных сетях, а также последствия совмещения в одном устройстве коммутации на 2-м и 3-м уровнях:
- поддержка интерфейсов и протоколов, применяемых в локальных сетях,
- усеченные функции маршрутизации,
- обязательная поддержка механизма виртуальных сетей,
- тесная интеграция функций коммутации и маршрутизации, наличие удобных для администратора операций по заданию маршрутизации между виртуальными сетями.
Наиболее "коммутаторная" версия высокоскоростной маршрутизации выглядит следующим образом (рисунок 9). Пусть коммутатор третьего уровня построен так, что в нем имеется информация о соответствии сетевых адресов (например, IP-адресов) адресам физического уровня (например, MAC-адресам) Все эти МАС-адреса обычным образом отображены в коммутационной таблице, независимо от того, принадлежат ли они данной сети или другим сетям.

Первый коммутатор, на который поступает пакет, частично выполняет функции маршрутизатора, а именно, функции фильтрации, обеспечивающие безопасность. Он решает, пропускать или нет данный пакет в другую сеть Если пакет пропускать нужно, то коммутатор по IP-адресу назначения определяет МАС-адрес узла назначения и формирует новый заголовок второго уровня с найденным МАС-адресом. Затем выполняется обычная процедура коммутации по данному МАС-адресу с просмотром адресной таблицы коммутатора. Все последующие коммутаторы, построенные по этому же принципу, обрабатывают данный кадр как обычные коммутаторы второго уровня, не привлекая функций маршрутизации, что значительно ускоряет его обработку. Однако функции маршрутизации не являются для них избыточными, поскольку и на эти коммутаторы могут поступать первичные пакеты (непосредственно от рабочих станций), для которых необходимо выполнять фильтрацию и подстановку МАС-адресов.
Это описание носит схематический характер и не раскрывает способов решения возникающих при этом многочисленных проблем, например, проблемы построения таблицы соответствия IP-адресов и МАС-адресов
Примерами коммутаторов третьего уровня, работающих по этой схеме, являются коммутаторы SmartSwitch компании Cabletron. Компания Cabletron реализовала в них свой протокол ускоренной маршрутизации SecureFast Virtual Network, SFVN.
Для организации непосредственного взаимодействия рабочих станций без промежуточного маршрутизатора необходимо сконфигурировать каждую из них так, чтобы она считала собственный интерфейс маршрутизатором по умолчанию. При такой конфигурации станция пытается самостоятельно отправить любой пакет конечному узлу, даже если этот узел находится в другой сети. Так как в общем случае (см. рисунок 10) станции неизвестен МАС-адрес узла назначения, то она генерирует соответствующий ARP-запрос, который перехватывает коммутатор, поддерживающий протокол SFVN. В сети предполагается наличие сервера SFVN Server, являющегося полноценным маршрутизатором и поддерживающего общую ARP-таблицу всех узлов SFVN-сети. Сервер возвращает коммутатору МАС-адрес узла назначения, а коммутатор, в свою очередь, передает его исходной станции. Одновременно сервер SFVN передает коммутаторам сети инструкции о разрешении прохождения пакета с МАС-адресом узла назначения через границы виртуальных сетей. Затем исходная станция передает пакет в кадре, содержащем МАС-адрес узла назначения. Этот кадр проходит через коммутаторы, не вызывая обращения к их блокам маршрутизации. Отличие протокола SFVN компании Cabletron от - описанной выше общей схемы в том, что для нахождения МАС-адреса по IP-адресу в сети используется выделенный сервер.
Протокол Fast IP компании 3Com является еще одним примером реализации подхода с отображением IP-адреса на МАС-адрес. В этом протоколе основными действующими лицами являются сетевые адаптеры (что не удивительно, так как компания 3Com является признанным лидером в производстве сетевых адаптеров Ethernet) С одной стороны, такой подход требует изменения программного обеспечения драйверов сетевых адаптеров, и это минус Но зато не требуется изменять все остальное сетевое оборудование.
При необходимости передать пакет узлу назначения другой сети, исходный узел в соответствии с технологией Fast IP должен передать запрос по протоколу NHRP (Next Hop Routing Protocol) маршрутизатору сети. Маршрутизатор переправляет этот запрос узлу назначения, как обычный пакет Узел назначения, который также поддерживает Fast IP и NHRP, получив запрос, отвечает кадром, отсылаемым уже не маршрутизатору, а непосредственно узлу-источнику (по его МАС-адресу, содержащемуся в NHRP-запросе). После этого обмен идет на канальном уровне на основе известных МАС-адресов. Таким образом, снова маршрутизировался только первый пакет потока (как на рисунке 9 кратковременный поток), а все остальные коммутировались (как на рисунке 9 долговременный поток).
Еще один тип коммутаторов третьего уровня — это коммутаторы, работающие с протоколами локальных сетей типа Ethernet и FDDI. Эти коммутаторы выполняют функции маршрутизации не так, как классические маршрутизаторы. Они маршрутизируют не отдельные пакеты, а потоки пакетов.
Поток — это последовательность пакетов, имеющих некоторые общие свойства. По меньшей мере, у них должны совпадать адрес отправителя и адрес получателя, и тогда их можно отправлять по одному и тому же маршруту. Если классический способ маршрутизации использовать только для первого пакета потока, а все остальные обрабатывать на основании опыта первого (или нескольких первых) пакетов, то можно значительно ускорить маршрутизацию всего потока.
Рассмотрим этот подход на примере технологии NetFlow компании Cisco, реализованной в ее маршрутизаторах и коммутаторах. Для каждого пакета, поступающего на порт маршрутизатора, вычисляется хэш-функция от IP-адресов источника, назначения, портов UDP или TCP и поля TOS, характеризующего требуемое качество обслуживания. Во всех маршрутизаторах, поддерживающих данную технологию, через которые проходит данный пакет, в кэш-памяти портов запоминается соответствие значения хэш-функции и адресной информации, необходимой для быстрой передачи пакета следующему маршрутизатору. Таким образом, образуется квазивиртуальный канал (см. Рисунок 11), который позволяет быстро передавать по сети маршрутизаторов все последующие пакеты этого потока. При этом ускорение достигается за счет упрощения процедуры обработки пакета маршрутизатором - не просматриваются таблицы маршрутизации, не выполняются ARP-запросы.
Этот прием может использоваться в маршрутизаторах, вообще не поддерживающих коммутацию, а может быть перенесен в коммутаторы. В этом случае такие коммутаторы тоже называют коммутаторами третьего уровня. Примеров маршрутизаторов, использующих данный подход, являются маршрутизаторы Cisco 7500, а коммутаторов третьего уровня — коммутаторы Catalyst 5000 и 5500. Коммутаторы Catalyst выполняют усеченные функции описанной схемы, они не могут обрабатывать первые пакеты потоков и создавать новые записи о хэш-функциях и адресной информации потоков. Они просто получают данную информацию от маршрутизаторов 7500 и обрабатывают пакеты уже распознанных маршрутизаторами потоков.
Выше был рассмотрен способ ускоренной маршрутизации, основанный на концепции потока. Его сущность заключается в создании квазивиртуальных каналов в сетях, которые не поддерживают виртуальные каналы в обычном понимании этого термина, то есть сетях Ethernet, FDDI, Token Ring и т п. Следует отличать этот способ от способа ускоренной работы маршрутизаторов в сетях, поддерживающих технологию виртуальных каналов — АТМ, frame relay, X 25. В таких сетях создание виртуального канала является штатным режимом работы сетевых устройств. Виртуальные каналы создаются между двумя конечными точками, причем для потоков данных, требующих разного качества обслуживания (например, для данных разных приложений) может создаваться отдельный виртуальный канал. Хотя время создания виртуального канала существенно превышает время маршрутизации одного пакета, выигрыш достигается за счет последующей быстрой передачи потока данных по виртуальному каналу. Но в таких сетях возникает другая проблема — неэффективная передача коротких потоков, то есть потоков, состоящих из небольшого количества пакетов (классический пример — пакеты протокола DNS).
Накладные расходы, связанные с созданием виртуального канала, приходящиеся на один пакет, снижаются при передаче объемных потоков данных. Однако они становятся неприемлемо высокими при передаче коротких потоков. Для того чтобы эффективно передавать короткие потоки, предлагается следующий вариант, при передаче нескольких первых пакетов выполняется обычная маршрутизация. Затем, после того как распознается устойчивый поток, для него строится виртуальный канал, и дальнейшая передача данных происходит с высокой скоростью по этому виртуальному каналу. Таким образом, для коротких потоков виртуальный канал вообще не создается, что и повышает эффективность передачи.
По такой схеме работает ставшая уже классической технология IP Switching компании Ipsilon. Для того чтобы сети коммутаторов АТМ передавали бы пакеты коротких потоков без установления виртуального канала, компания Ipsilon предложила встроить во все коммутаторы АТМ блоки IP-маршрутизации (рисунок 12), строящие обычные таблицы маршрутизации по обычным протоколам RIP и OSPF.
Компания Cisco Systems выдвинула в качестве альтернативы технологии IP Switching свою собственную технологию Tag Switching, но она не стала стандартной. В настоящее время IETF работает над стандартным протоколом обмена метками MPLS (Multi-Protocol Label Switching), который обобщает предложение компаний Ipsilon и Cisco, а также вносит некоторые новые детали и механизмы. Этот протокол ориентирован на поддержку качества обслуживания для виртуальных каналов, образованных метками.
Коммутация четвертого уровня
Свойства четвертого или транспортного уровня модели OSI следующие: транспортный уровень обеспечивает услуги по транспортировке данных. В частности, заботой транспортного уровня является решение таких вопросов, как выполнение надежной транспортировки данных через объединенную сеть. Предоставляя надежные услуги, транспортный уровень обеспечивает механизмы для установки, поддержания и упорядоченного завершения действия виртуальных каналов, систем обнаружения и устранения неисправностей транспортировки и управления информационным потоком (с целью предотвращения переполнения данными из другой системы).
Некоторые производители заявляют, что их системы могут работать на втором, третьем и даже четвертом уровнях. Однако рассмотрение описания стека TCP/IP (рисунок 1), а также структуры пакетов IP и TCP (рисунки 2, 3), показывает, что коммутация четвертого уровня является фикцией, так как все относящиеся к коммутации функции осуществляются на уровне не выше третьего. А именно, термин коммутация четвертого уровня с точки зрения описания стека TCP/IP противоречий не имеет, за исключением того, что при коммутации должны указываться адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя. Пакеты TCP имеют поля локальный порт отправителя и локальный порт получателя (рисунок 3), несущие смысл точек входа в приложение (в программу), например Telnet с одной стороны, и точки входа (в данном контексте инкапсуляции) в уровень IP. Кроме того, в стеке TCP/IP именно уровень TCP занимается формированием пакетов из потока данных идущих от приложения. Пакеты IP (рисунок 2) имеют поля адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя и следовательно могут наряду с MAC адресами использоваться для коммутации. Тем не менее, название прижилось, к тому же практика показывает, что способность системы анализировать информацию прикладного уровня может оказаться полезной — в частности для управления трафиком. Таким образом, термин "зависимый от приложения" более точно отражает функции так называемых коммутаторов четвертого уровня.


Тематики
EN
Англо-русский словарь нормативно-технической терминологии > switching technology
-
5 repudiation
непризнание авторства
Отказ признания одним из участвующих в сеансе связи объектов участия во всем или в части сеанса связи. Объект, задействованный в обмене информацией, последовательно отрицает этот факт. Если пользователь системы MHS (в случае системы MHS) или система MTS в дальнейшем могут отрицать факт представления, приема или создания сообщения, включая отрицание происхождения, отрицание представления, отрицание доставки.
[http://www.rfcmd.ru/glossword/1.8/index.php?a=index&d=23]Тематики
EN
отказ от исполнения
Отказ одной из сторон сделки от участия в данной сделке или ее части либо от содержания информационного сообщения.
[Глоссарий терминов, используемых в платежных и расчетных системах. Комитет по платежным и расчетным системам Банка международных расчетов. Базель, Швейцария, март 2003 г.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > repudiation
-
6 fault
- ток повреждения
- сверхток
- сброс
- сбой
- разлом
- повреждение (цепи, линии, устройства)
- повреждение (во взрывозащите)
- повреждение
- ошибка
- отказ
- ненормальный режим работы
- неисправность
- неисправное состояние
- нарушение
- короткое замыкание
- дизъюктивное нарушение
- дефект
- выход из строя
- аварийное сообщение
аварийное сообщение
-Параллельные тексты EN-RU
The system offers diagnostic and statistics functions and configurable warnings and faults, allowing better prediction of component maintenance, and provides data to continuously improve the entire system.
[Schneider Electric]Система (управления электродвигателем) предоставляет оператору различную диагностическую и статистическую информацию и позволяет сконфигурировать предупредительные и аварийные сообщения, что дает возможность лучше планировать техническое обслуживание и постоянно улучшать систему в целом.
[Перевод Интент]Various alarm notifications are available to indicate a compromised security state such as forced entry and door position.
[APC]Устройство может формировать различные аварийные сообщения о нарушении защиты, например, о несанкционированном проникновении или об изменении положения двери.
[Перевод Интент]
Тематики
EN
выход из строя
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]
выход системы из строя
вследствие отказа аппаратного или программного обеспечения либо средств связи
[Англо-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. © 1998-2007 гг., Э.М. Пройдаков, Л.А. Теплицкий. 13,8 тыс. статей.]
выход из строя
-
[Интент]Единичные выходы из строя в процессе испытаний элементов электронной техники (микросхем, электровакуумных и полупроводниковых приборов, конденсаторов, резисторов, кварцевых резонаторов и т.д.), а также ламп накаливания и предохранителей не могут служить основанием для прекращения испытаний, если это не вызвано недостатком конструкции прибора.
При повторных выходах из строя тех же элементов испытания следует считать неудовлетворительными.
[ ГОСТ 24314-80]При выходе из строя отдельно стоящих вентиляторов на двигателях мельниц, дымососов, мельничных вентиляторов, вентиляторов первичного воздуха и т.д. необходимо при первой возможности, но не позже чем его допускается заводской инструкцией, отключить двигатель 6 кВ для ремонта вентилятора охлаждения двигателя.
[РД 34.20.565]Судовая электрическая сеть, предназначенная для передачи электроэнергии при выходе из строя линий электропередачи силовой сети или исчезновении напряжения
[ ГОСТ 22652-77]Тематики
Синонимы
EN
дизъюктивное нарушение
Относительное перемещение частей пластов вдоль плоскости их разрыва (геол.)
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
короткое замыкание
Случайное или намеренное соединение резистором или импедансом со сравнительно низким сопротивлением двух или более точек в цепи, нормально находящихся под различным напряжением.
Случайное или намеренное низкоимпедансное или низкоомное соединение двух или более точек электрической цепи, нормально находящихся под разными электрическими потенциалами. (вариант компании Интент)
МЭК 60050(151-03-41) [2].
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
короткое замыкание
Случайный или преднамеренный проводящий путь между двумя или более проводящими частями, принуждающий различия электрических потенциалов между этими проводящими частями становиться равными или близкими к нулю.
Короткое замыкание обычно возникает в аварийном режиме электроустановки здания при повреждении изоляции токоведущих частей, находящихся под разными электрическими потенциалами, и возникновении между этими частями электрического контакта, имеющего пренебрежимо малое полное сопротивление. Короткое замыкание также может быть следствием ошибочных действий, совершаемых персоналом при монтаже и эксплуатации электроустановки здания, когда соединяют между собой проводящие части, которые в нормальном режиме находятся под разными электрическими потенциалами.
Короткое замыкание характеризуется током короткого замыкания, который, многократно превышая номинальный ток электрической цепи, может вызвать возгорание её элементов и явиться причиной пожара в здании. Поэтому в электроустановках зданий всегда проводят мероприятия, направленные на снижение вероятности возникновения короткого замыкания, а также выполняют защиту от короткого замыкания с помощью устройств защиты от сверхтока.
[ http://www.volt-m.ru/glossary/letter/%CA/view/27/]
короткое замыкание
Случайное или преднамеренное соединение двух или более проводящих частей, вызывающее снижение разности электрических потенциалов между этими частями до нуля или значения, близкого к нулю.
[ ГОСТ Р МЭК 60050-195-2005]
короткое замыкание
КЗ
замыкание, при котором токи в ветвях электроустановки, примыкающих к месту его возникновения, резко возрастают, превышая наибольший допустимый ток продолжительного режима
[Методические указания по защите распределительных электрических сетей напряжением 0,4-10 кВ от грозовых перенапряжений]EN
short-circuit
accidental or intentional conductive path between two or more conductive parts forcing the electric potential differences between these conductive parts to be equal to or close to zero
Source: 151-03-41 MOD
[IEV number 195-04-11]FR
court-circuit
chemin conducteur accidentel ou intentionnel entre deux ou plusieurs parties conductrices forçant les différences de potentiel électriques entre ces parties conductrices à être nulles ou proches de zéro
Source: 151-03-41 MOD
[IEV number 195-04-11]Параллельные тексты EN-RU
A short-circuit is a low impedance connection between two conductors at different voltages.
[ABB]Короткое замыкание представляет собой низкоомное соединение двух проводников, находящихся под разными потенциалами.
[Перевод Интент]Тематики
- электробезопасность
- электротехника, основные понятия
Синонимы
- КЗ
EN
DE
FR
нарушение
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]EN
fault
Another term for offense.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]
Тематики
EN
неисправное состояние
Состояние объекта, при котором он не соответствует хотя бы одному из требований нормативно-технической и (или) конструкторской (проектной) документации.
[ ГОСТ 27.002-89]
[ОСТ 45.152-99]
неисправное состояние
неисправность
По ГОСТ 13377-75
[ ГОСТ 24166-80]
неисправное состояние
Состояние системы тревожной сигнализации, препятствующее реагированию системы на наличие опасности в соответствии с требованиями стандартов.
[ ГОСТ Р 50775-95]
[МЭК 839-1-1-88]Тематики
- надежность, основные понятия
- ремонт судов
- системы охраны и безопасности
- тех. обсл. и ремонт средств электросвязи
Обобщающие термины
Синонимы
EN
DE
FR
неисправность
отказ в работе
Состояние машины, характеризующееся неспособностью выполнять заданную функцию, исключая случаи проведения профилактического технического обслуживания, других запланированных действий или недостаток внешних ресурсов (например, отключение энергоснабжения).
Примечание 1
Неисправность часто является результатом повреждения самой машины, однако она может иметь место и без повреждения.
Примечание 2
На практике термины «неисправность», «отказ» и «повреждение» часто используются как синонимы.
[ ГОСТ Р ИСО 12100-1:2007]
неисправность
Состояние оборудования, характеризуемое его неспособностью выполнять требуемую функцию, исключая профилактическое обслуживание или другие планово-предупредительные действия, а также исключая неспособность выполнять требуемую функцию из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является следствием отказа самого оборудования, но может существовать и без предварительного отказа.
[ГОСТ ЕН 1070-2003]
неисправность
Состояние технического объекта (элемента), характеризуемое его неспособностью выполнять требуемую функцию, исключая периоды профилактического технического обслуживания или другие планово-предупредительные действия, или в результате недостатка внешних ресурсов.
Примечания
1 Неисправность является часто следствием отказа самого технического объекта, но может существовать и без предварительного отказа.
2 Английский термин «fault» и его определение идентичны данному в МЭК 60050-191 (МЭС 191-05-01) [1]. В машиностроении чаще применяют французский термин «defaut» или немецкий термин «Fehler», чем термины «panne» и «Fehlzusstand», которые употребляют с этим определением.
[ ГОСТ Р ИСО 13849-1-2003]Тематики
EN
- abnormality
- abort
- abortion
- breakage
- breakdown
- bug
- defect
- disease
- disrepair
- disturbance
- fail
- failure
- failure occurrence
- fault
- faultiness
- fouling
- health problem
- layup
- malfunction
- problem
- shutdown
- trouble
DE
FR
ненормальный режим работы электротехнического изделия
Режим работы электротехнического изделия (электротехнического устройства, электрооборудования), при котором значение хотя бы одного из параметров режима выходит за пределы наибольшего или наименьшего рабочего значения.
[ ГОСТ 18311-80]
К ненормальным относятся режимы, связанные с отклонениями от допустимых значений величин тока, напряжения и частоты, опасные для оборудования или устойчивой работы энергосистемы.
Рассмотрим наиболее характерные ненормальные режимы.а) Перегрузка оборудования, вызванная увеличением тока сверх номинального значения. Номинальным называется максимальный ток, допускаемый для данного оборудования в течение неограниченного времени.
Если ток, проходящий по оборудованию, превышает номинальное значение, то за счет выделяемого им дополнительного тепла температура токоведущих частей и изоляции через некоторое время превосходит допустимую величину, что приводит к ускоренному износу изоляции и ее повреждению. Время, допустимое для прохождения повышенных токов, зависит от их величины. Характер этой зависимости показан на рис. 1-3 и определяется конструкцией оборудования и типом изоляционных материалов. Для предупреждения повреждения оборудования при его перегрузке необходимо принять меры к разгрузке или отключению оборудования.б) Качания в системах возникают при выходе из синхронизма работающих параллельно генераторов (или электростанций) А и В (рис. 1-2, б). При качаниях в каждой точке системы происходит периодическое изменение («качание») тока и напряжения. Ток во всех элементах сети, связывающих вышедшие из синхронизма генераторы А и В, колеблется от нуля до максимального значения, во много раз превышающего нормальную величину. Напряжение падает от нормального до некоторого минимального значения, имеющего разную величину в каждой точке сети. В точке С, называемой электрическим центром качаний, оно снижается до нуля, в остальных точках сети напряжение падает, но остается больше нуля, нарастая от центра качания С к источникам питания А и В. По характеру изменения тока и напряжения качания похожи на к. з. Возрастание тока вызывает нагревание оборудования, а уменьшение напряжения нарушает работу всех потребителей системы. Качание — очень опасный ненормальный режим, отражающийся на работе всей энергосистемы.
в) Повышение напряжения сверх допустимого значения возникает обычно на гидрогенераторах при внезапном отключении их нагрузки. Разгрузившийся гидрогенератор увеличивает частоту вращения, что вызывает возрастание э. д. с. статора до опасных для его изоляции значений. Защита в таких случаях должна снизить ток возбуждения генератора или отключить его.
Опасное для изоляции оборудования повышение напряжения может возникнуть также при одностороннем отключении или включении длинных линий электропередачи с большой емкостной проводимостью.
Кроме отмеченных ненормальных режимов, имеются и другие, ликвидация которых возможна при помощи релейной защиты.[Чернобровов Н. В. Релейная защита. Учебное пособие для техникумов]
Тематики
- изделие электротехническое
- релейная защита
- электротехника, основные понятия
Синонимы
EN
отказ
Нарушение способности оборудования выполнять требуемую функцию.
Примечания
1. После отказа оборудование находится в неисправном состоянии.
2. «Отказ» является событием, в отличие от «неисправности», которая является состоянием.
3. Это понятие, как оно определено, не применяют коборудованиюобъекту, состоящему только из программных средств.
4. На практике термины «отказ» и «неисправность» часто используют как синонимы.
[ГОСТ ЕН 1070-2003]
[ ГОСТ Р ИСО 13849-1-2003]
[ ГОСТ Р МЭК 60204-1-2007]
отказ
Событие, заключающееся в нарушении работоспособного состояния объекта.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
[СО 34.21.307-2005]
отказ
Событие, заключающееся в нарушении работоспособного состояния машины и (или) оборудования вследствие конструктивных нарушений при проектировании, несоблюдения установленного процесса производства или ремонта, невыполнения правил или инструкций по эксплуатации.
[Технический регламент о безопасности машин и оборудования]EN
failure
the termination of the ability of an item to perform a required function
NOTE 1 – After failure the item has a fault.
NOTE 2 – "Failure" is an event, as distinguished from "fault", which is a state.
NOTE 3 – This concept as defined does not apply to items consisting of software only.
[IEV number 191-04-01]
NOTE 4 - In practice, the terms fault and failure are often used synonymously
[IEC 60204-1-2006]FR
défaillance
cessation de l'aptitude d'une entité à accomplir une fonction requise
NOTE 1 – Après défaillance d'une entité, cette entité est en état de panne.
NOTE 2 – Une défaillance est un passage d'un état à un autre, par opposition à une panne, qui est un état.
NOTE 3 – La notion de défaillance, telle qu'elle est définie, ne s'applique pas à une entité constituée seulement de logiciel.
[IEV number 191-04-01]Тематики
- безопасность в целом
- безопасность гидротехнических сооружений
- безопасность машин и труда в целом
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
DE
FR
повреждение
Повреждение любого элемента, разделения, изоляции или соединения между элементами, не являющихся неповреждаемыми по МЭК 60079-11 [8], при проведении испытаний на искробезопасность.
[ ГОСТ Р МЭК 60050-426-2006]
Тематики
EN
повреждение (цепи, линии, устройства)
-
[Интент]Тематики
- выключатель автоматический
- релейная защита
- электротехника, основные понятия
EN
разлом
—
[ http://www.eionet.europa.eu/gemet/alphabetic?langcode=en]EN
fault
A fracture or a zone of fractures along which there has been displacement of the sides relative to one another parallel to the fracture. (Source: BJGEO)
[http://www.eionet.europa.eu/gemet/alphabetic?langcode=en]Тематики
EN
DE
FR
сбой
Самоустраняющийся отказ или однократный отказ, устраняемый незначительным вмешательством оператора.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
сбой
Ненормальный режим, который может вызвать уменьшение или потерю способности функционального блока выполнять требуемую функцию.
Примечание
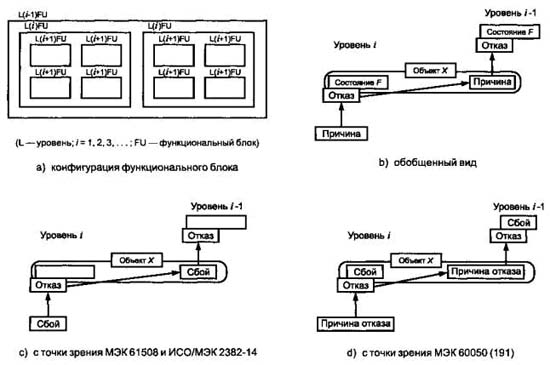
МЭС 191-05-01 определяет «сбой» как состояние, характеризуемое неспособностью выполнить необходимую функцию, исключая неспособности, возникающие во время профилактического ухода или других плановых мероприятий, либо в результате недостатка внешних ресурсов. Иллюстрация к этим двум точкам зрения показана на рисунке [ ИСО / МЭК 2382-14-01-10].
[ ГОСТ Р МЭК 61508-4-2007]Тематики
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
сброс
Разрывное нарушение, при котором сместитель падает в сторону опущенного крыла (висячее крыло опущено относительно лежачего).
[ Словарь геологических терминов и понятий. Томский Государственный Университет]Тематики
- геология, геофизика
Обобщающие термины
EN
сверхток
Любой ток, превышающий номинальный
МЭК 60050(441-11-06).
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
[ ГОСТ Р 50345-99( МЭК 60898-95)]
сверхток
Электрический ток, превышающий номинальный электрический ток.
Сверхток представляет собой любой электрический ток, величина которого превышает номинальный ток какого-либо элемента электроустановки здания или используемого в ней электрооборудования, например: номинальный ток электрической цепи, допустимый длительный ток проводника, номинальный ток автоматического выключателя и т. д. В нормативной и правовой документации различают два основных вида сверхтока – ток перегрузки и ток короткого замыкания.
Появление сверхтока в каком-либо элементе электроустановки здания может привести к его перегреву, возгоранию и, как следствие, к возникновению пожара в здании. Поэтому в электроустановках зданий выполняют защиту от сверхтока.
[ http://www.volt-m.ru/glossary/letter/%D1/view/59/]
сверхток
сверхток в электротехническом изделии
Ток, значение которого превосходит наибольшее рабочее значение тока электротехнического изделия (устройства).
[ ГОСТ 18311-80]
сверхток
Электрический ток, превышающий номинальный электрический ток.
Примечание - Для проводников номинальный ток считается равным длительному допустимому току.
[ ГОСТ Р МЭК 60050-826-2009]
Сверхток может оказывать или может не оказывать вредные воздействия в зависимости от его величины и продолжительности. Сверхтоки могут возникать в результате перегрузок в электроприемниках или при повреждениях, таких как короткие замыкания или замыканиях на землю
[ ГОСТ Р 50571. 1-2009 ( МЭК 60364-1: 2005)]
сверхток
Любой ток, превышающий номинальное значение. Для проводов номинальным значением является допустимый ток.
[ ГОСТ Р МЭК 60204-1-2007]EN
overcurrent
electric current exceeding the rated electric current
NOTE – For conductors, the rated current is considered as equal to the current-carrying capacity
[IEV number 826-11-14]
over-current
<>current exceeding the rated current
<>[IEC 61095, ed. 2.0 (2009-02)]
over-current
electric current the value of which exceeds a specified limiting value
[IEV number 151-15-28]
[IEV number 442-01-20]FR
surintensité, f
courant électrique supérieur au courant électrique assigné
NOTE – Pour des conducteurs, on considère que le courant assigné est égal au courant admissible.
[IEV number 826-11-14]
surintensité
courant supérieur au courant assigné
[IEC 61095, ed. 2.0 (2009-02)]
[IEV number 442-01-20]
surintensité, f
courant électrique dont la valeur dépasse une valeur limite spécifiée
[IEV number 151-15-28]Параллельные тексты EN-RU The design of LV installations leads to basic protection devices being fitted for three types of faults:
-
overloads
-
short-circuits
-
insulation faults
Низковольтные электроустановки должны быть оснащены устройствами защиты трех типов:
-
от перегрузки;
-
от короткого замыкания;
- от токов утечки.
[Перевод Интент]
Примечание.
Слово fault в данном случае пришлось опустить, поскольку:
- его нельзя перевести как "неисправность", т. к. возникновение перегрузки ( overload) не является неисправностью;
- его нельзя перевести как "сверхток", т. к. ток утечки не является сверхтоком.The chosen switchgear must withstand and eliminate faults at optimised cost with respect to the necessary performance.
[Schneider Electric]Выбранная аппаратура распределения должна иметь такие характеристики, чтобы рентабельно выдерживать и ограничивать сверхтоки.
[Перевод Интент]Тематики
Синонимы
EN
DE
FR
ток повреждения
Ток, возникающий в результате пробоя или перекрытия изоляции.
[ ГОСТ Р 51321. 1-2000 ( МЭК 60439-1-92)]
ток повреждения
Ток, который протекает через данную точку повреждения в результате повреждения изоляции.
[ ГОСТ Р МЭК 60050-826-2009]EN
fault current
current resulting from an insulation failure, the bridging of insulation or incorrect connection in an electrical circuit
[IEC 61439-1, ed. 2.0 (2011-08)]
fault current
current which flows across a given point of fault resulting from an insulation fault
[IEV number 826-11-11]FR
courant de défaut
courant résultant d'un défaut de l'isolation, du contournement de l’isolation ou d’un raccordement incorrect dans un circuit électrique
[IEC 61439-1, ed. 2.0 (2011-08)]
courant de défaut, m
courant s'écoulant en un point de défaut donné, consécutivement à un défaut de l'isolation
[IEV number 826-11-11]Тематики
EN
DE
- Fehlerstrom, m
FR
- courant de défaut, m
3.7.2 повреждение (fault): Повреждение любого элемента, разделения, изоляции или соединения между элементами, не являющимися по настоящему стандарту не повреждаемыми, от которых зависит искробезопасность цепи.
Источник: ГОСТ Р 52350.11-2005: Электрооборудование для взрывоопасных газовых сред. Часть 11. Искробезопасная электрическая цепь "I" оригинал документа
3.16 неисправность (fault): Состояние объекта, характеризующееся неспособностью исполнять требуемую функцию, исключая время профилактического технического обслуживания или других запланированных действий, или простои из-за недостатка внешних ресурсов
Примечание - Неисправность часто является результатом отказа объекта, но может существовать и без отказа.
Источник: ГОСТ Р 51901.6-2005: Менеджмент риска. Программа повышения надежности оригинал документа
3.6 неисправность (fault): Состояние элемента, характеризующееся неспособностью исполнять требуемую функцию, исключая период технического обслуживания, ремонта или других запланированных действий, а также из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является результатом отказа элемента, но может существовать и без предшествующего отказа.
Источник: ГОСТ Р 51901.5-2005: Менеджмент риска. Руководство по применению методов анализа надежности оригинал документа
3.5 неисправность (fault): Состояние объекта, когда один из его элементов или группа элементов проявляют признаки деградации или нарушения работы, что может привести к отказу машины.
Примечания
1 Неисправность часто является следствием отказа, но может иметь место и при его отсутствии.
2 Состояние объекта не рассматривают как неисправное, если оно возникло вследствие запланированных процедур или нехватки внешних ресурсов.
Источник: ГОСТ Р ИСО 13379-2009: Контроль состояния и диагностика машин. Руководство по интерпретации данных и методам диагностирования оригинал документа
3.3 неисправность (fault): Состояние объекта, при котором он не способен выполнять требуемую функцию, за исключением такой неспособности при техническом обслуживании или других плановых мероприятиях или вследствие нехватки внешних ресурсов.
Примечания
1 Неисправность часто является следствием отказа объекта, но может иметь место и без него.
2 В настоящем стандарте термин «неисправность» используется наряду с термином «отказ» по историческим причинам.
Источник: ГОСТ Р 51901.12-2007: Менеджмент риска. Метод анализа видов и последствий отказов оригинал документа
3.1.30 ошибка (fault): Разность между погрешностью весоизмерительного датчика и основной погрешностью весоизмерительного датчика (см. 3.1.34).
Источник: ГОСТ Р 8.726-2010: Государственная система обеспечения единства измерений. Датчики весоизмерительные. Общие технические требования. Методы испытаний оригинал документа
3.6 дефект (fault): Неисправность или ошибка в компоненте технического обеспечения, программного обеспечения или системы
[МЭК 61513, пункт 3.22]
Примечание 1 - Дефекты могут подразделяться на случайные, например, в результате ухудшения аппаратных средств из-за старения, и систематические, например, ошибки в программном обеспечении, которые вытекают из погрешностей проектирования.
Примечание 2 - Дефект (в особенности дефект проекта) может остаться необнаруженным в системе до тех пор, пока не окажется, что полученный результат не соответствует намеченной функции, то есть возникает отказ.
Примечание 3 - См. также «ошибка программного обеспечения» и «случайный дефект».
Источник: ГОСТ Р МЭК 62340-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Требования по предотвращению отказов по общей причине оригинал документа
3.2 неисправность (fault): Состояние объекта, когда один из его элементов или группа элементов проявляет признаки деградации или нарушения работы, что может привести к отказу машины.
Примечание - Неисправность может привести к отказу.
Источник: ГОСТ Р ИСО 17359-2009: Контроль состояния и диагностика машин. Общее руководство по организации контроля состояния и диагностирования оригинал документа
3.17 дефект (fault): Неисправность или ошибка в компоненте технического обеспечения, программного обеспечения или системы.
[МЭК 61513, пункт 3.22]
Источник: ГОСТ Р МЭК 60880-2010: Атомные электростанции. Системы контроля и управления, важные для безопасности. Программное обеспечение компьютерных систем, выполняющих функции категории А оригинал документа
3.6.1 сбой (fault): Ненормальный режим, который может вызвать уменьшение или потерю способности функционального блока выполнять требуемую функцию.
Примечание - МЭС 191-05-01 определяет «сбой» как состояние, характеризуемое неспособностью выполнить необходимую функцию, исключая неспособности, возникающие во время профилактического ухода или других плановых мероприятий, либо в результате недостатка внешних ресурсов. Иллюстрация к этим двум точкам зрения показана на рисунке 4 [ИСО/МЭК 2382-14-01-10].
Источник: ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа
3.22 дефект (fault): Дефект в аппаратуре, программном обеспечении или в компоненте системы (см. рисунок 3).
Примечание 1 -Дефекты могут быть результатом случайных отказов, которые возникают, например, из-за деградации аппаратуры в результате старения; возможны систематические дефекты, например, в результате дефектов в программном обеспечении, возникающих из-за ошибок при проектировании.
Примечание 2 - Дефект (особенно дефекты, связанные с проектированием) может оставаться незамеченным, пока сохраняются условия, при которых он не отражается на выполнении функции, т.е. пока не произойдет отказ.
Примечание 3 - См. также «дефект программного обеспечения».
Источник: ГОСТ Р МЭК 61513-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования оригинал документа
4.10.1 ошибка (fault): Разность между погрешностью показаний и погрешностью прибора.
Источник: ГОСТ Р ЕН 1434-1-2011: Теплосчетчики. Часть 1. Общие требования
Англо-русский словарь нормативно-технической терминологии > fault
-
7 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
8 generic object oriented substation event
- широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.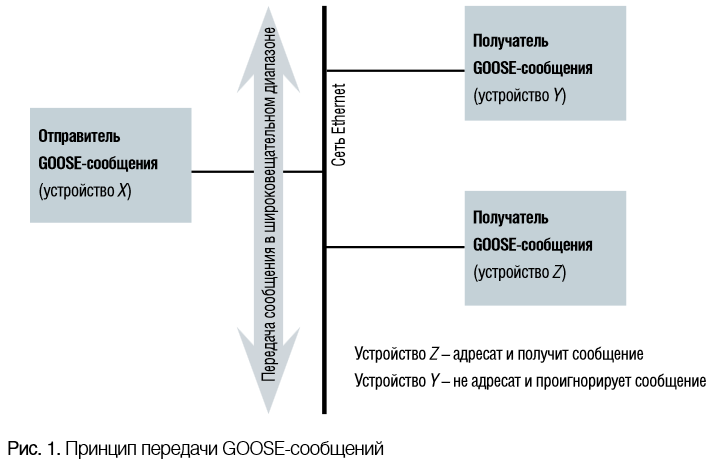
Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.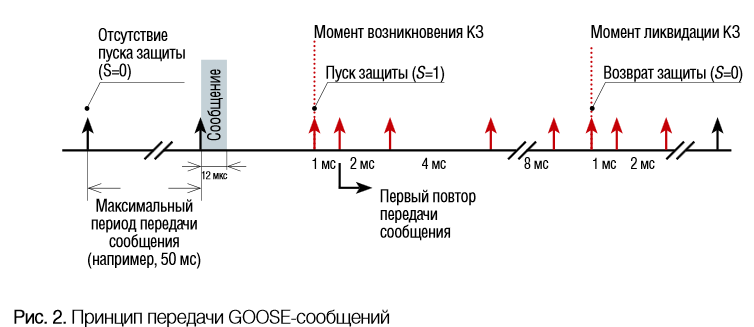
Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).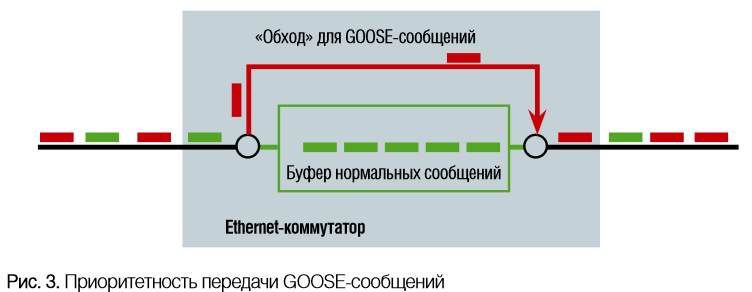
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
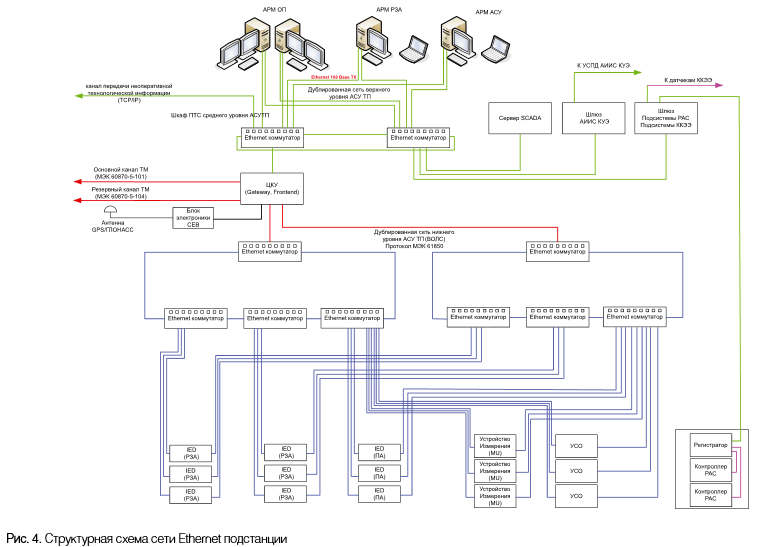
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).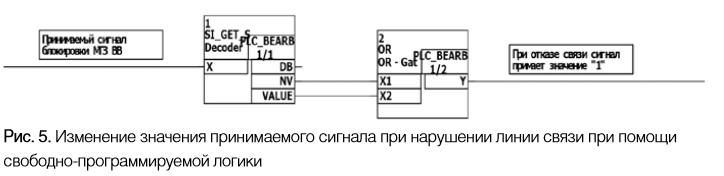
К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > generic object oriented substation event
9 GOOSE
- широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > GOOSE
10 field bus
полевая шина
-
[Интент]
полевая магистраль по зарубежной терминологии
Имеет много терминов-синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и исполнительных органов. Магистрали рассчитаны на применение в машиностроении, химической промышленности, в системах автоматизации зданий, крупных установках, бытовых электронных системах, системах автомобильного оборудования, малых контрольно-измерительных и управляющих системах на основе встраиваемых микроЭВМ и т. п. Основными магистралями являются Bitbus, MIL STD-1553В. В настоящее время рабочими группами IEC (65С и SP-50) стандартизируются два основных типа МЛС: высокоскоростные и низкоскоростные, ориентированные на датчики.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]ЧТО ТАКОЕ FIELDВUS?
Так пишется оригинальный термин, который в русском переводе звучит как «промышленная сеть». Fieldbus — это не какой-то определенный протокол передачи данных и не тип сетевой архитектуры, этот термин не принадлежит ни одной отдельно взятой компании и обозначает скорее сферу применения, чем какую-либо конкретную сетевую технологию.
Давайте попробуем сформулировать лишь некоторые основные требования, которые можно предъявить к «идеальной» промышленной сети.
1. Производительность.
2. Предсказуемость времени доставки информации.
3. Помехоустойчивость.
4. Доступность и простота организации физического канала передачи данных.
5. Максимальный сервис для приложений верхнего уровня.
6. Минимальная стоимость устройств аппаратной реализации, особенно на уровне контроллеров.
7. Возможность получения «распределенного интеллекта», путем предоставления максимального доступа к каналу нескольким ведущим узлам.
8.Управляемость и самовосстановление в случае возникновения нештатных ситуаций.
[Сергей Гусев. Краткий экскурс в историю промышленных сетей]
Международный стандарт IEC 61158 “Fieldbus for use in Industrial Control Systems” («Промышленная управляющая сеть для применения в промышленных системах управления») определяет восемь независимых и несовместимых коммуникационных технологий, из которых FOUNDATION Fieldbus H1 и PROFIBUS PA стали в значительной степени преобладающими в различных отраслях промышленности.
Эти промышленные сети соответствуют требованиям стандарта IEC 61158 2, который устанавливает физический уровень так называемых промышленных сетей H1.
Основными требованиями к промышленным сетям H1 являются:
● передача данных и питание устройств нижнего уровня по одной витой паре;
● гибкость при проектировании различных топологий сети;
● совместимость всех полевых приборов;
● взрывобезопасность при установкево взрывоопасных зонах;
● распределение одной инфраструктуры на многочисленные сегменты.[Виктор Жданкин. Концепция FieldConnex® для промышленных сетей FOUNDATION Fieldbus H1 и PROFIBUS_PA: повышение производительности и снижение затрат. СТА 2/2009]
Термин полевая шина является дословным переводом английского термина fieldbus.
Термин промышленная сеть является более точным переводом и в настоящее время именно он используется в профессиональной технической литературе.Промышленная сеть — сеть передачи данных, связывающая различные датчики, исполнительные механизмы, промышленные контроллеры и используемая в промышленной автоматизации. Термин употребляется преимущественно в автоматизированной системе управления технологическими процессами (АСУТП).
Устройства используют сеть для:
- передачи данных, между датчиками, контроллерами и исполнительными механизмами;
- диагностики и удалённого конфигурирования датчиков и исполнительных механизмов;
- калибрования датчиков;
- питания датчиков и исполнительных механизмов;
- связи между датчиками, исполнительными механизмами, ПЛК и АСУ ТП верхнего уровня.
В промышленных сетях для передачи данных применяют:
- электрические линии;
- волоконно-оптические линии;
- беспроводную связь (радиомодемы и Wi-Fi).
Промышленные сети могут взаимодействовать с обычными компьютерными сетями, в частности использовать глобальную сеть Internet.
[ Википедия]
Главной функцией полевой шины является обеспечение сетевого взаимодействия между контроллерами и удаленной периферией (например, узлами ввода/вывода). Помимо этого, к полевой шине могут подключаться различные контрольно-измерительные приборы ( Field Devices), снабженные соответствующими сетевыми интерфейсами. Такие устройства часто называют интеллектуальными ( Intelligent Field Devices), так как они поддерживают высокоуровневые протоколы сетевого обмена.
Пример полевой шины представлен на рисунке 1.
Рис. 1. Полевая шина.Как уже было отмечено, существует множество стандартов полевых шин, наиболее распространенные из которых приведены ниже:
1. Profibus DP
2. Profibus PA
3. Foundation Fieldbus
4. Modbus RTU
5. HART
6. DeviceNet
Несмотря на нюансы реализации каждого из стандартов (скорость передачи данных, формат кадра, физическая среда), у них есть одна общая черта – используемый алгоритм сетевого обмена данными, основанный на классическом принципе Master-Slave или его небольших модификациях.
Современные полевые шины удовлетворяют строгим техническим требованиям, благодаря чему становится возможной их эксплуатация в тяжелых промышленных условиях. К этим требованиям относятся:- Детерминированность. Под этим подразумевается, что передача сообщения из одного узла сети в другой занимает строго фиксированный отрезок времени. Офисные сети, построенные по технологии Ethernet, - это отличный пример недетерминированной сети. Сам алгоритм доступа к разделяемой среде по методу CSMA/CD не определяет время, за которое кадр из одного узла сети будет передан другому, и, строго говоря, нет никаких гарантий, что кадр вообще дойдет до адресата. Для промышленных сетей это недопустимо. Время передачи сообщения должно быть ограничено и в общем случае, с учетом количества узлов, скорости передачи данных и длины сообщений, может быть заранее рассчитано.
- Поддержка больших расстояний. Это существенное требование, ведь расстояние между объектами управления может порой достигать нескольких километров. Применяемый протокол должен быть ориентирован на использование в сетях большой протяженности.
- Защита от электромагнитных наводок. Длинные линии в особенности подвержены пагубному влиянию электромагнитных помех, излучаемых различными электрическими агрегатами. Сильные помехи в линии могут исказить передаваемые данные до неузнаваемости. Для защиты от таких помех применяют специальные экранированные кабели, а также оптоволокно, которое, в силу световой природы информационного сигнала, вообще нечувствительно к электромагнитным наводкам. Кроме этого, в промышленных сетях должны использоваться специальные методы цифрового кодирования данных, препятствующие их искажению в процессе передачи или, по крайней мере, позволяющие эффективно детектировать искаженные данные принимающим узлом.
- Упрочненная механическая конструкция кабелей и соединителей. Здесь тоже нет ничего удивительного, если представить, в каких условиях зачастую приходиться прокладывать коммуникационные линии. Кабели и соединители должны быть прочными, долговечными и приспособленными для использования в самых тяжелых окружающих условиях (в том числе агрессивных атмосферах).
По типу физической среды полевые шины делятся на два типа:
-
Полевые шины, построенные на базе оптоволоконного кабеля.
Преимущества использования оптоволокна очевидны: возможность построения протяженных коммуникационных линий (протяженностью до 10 км и более); большая полоса пропускания; иммунитет к электромагнитным помехам; возможность прокладки во взрывоопасных зонах.
Недостатки: относительно высокая стоимость кабеля; сложность физического подключения и соединения кабелей. Эти работы должны выполняться квалифицированными специалистами. -
Полевые шины, построенные на базе медного кабеля.
Как правило, это двухпроводной кабель типа “витая пара” со специальной изоляцией и экранированием. Преимущества: удобоваримая цена; легкость прокладки и выполнения физических соединений. Недостатки: подвержен влиянию электромагнитных наводок; ограниченная протяженность кабельных линий; меньшая по сравнению с оптоволокном полоса пропускания.
Итак, перейдем к рассмотрению методов обеспечения отказоустойчивости коммуникационных сетей, применяемых на полевом уровне. При проектировании и реализации этот аспект становится ключевым, так как в большой степени определяет характеристики надежности всей системы управления в целом.
На рисунке 2 изображена базовая архитектура полевой шины – одиночная (нерезервированная). Шина связывает контроллер С1 и четыре узла ввода/вывода IO1-IO4. Очевидно, что такая архитектура наименее отказоустойчива, так как обрыв шины, в зависимости от его локализации, ведет к потере коммуникации с одним, несколькими или всеми узлами шины. В нашем случае в результате обрыва теряется связь с двумя узлами.
Рис. 2. Нерезервированная шина.Здесь важное значение имеет термин “единичная точка отказа” (SPOF, single point of failure). Под этим понимается место в системе, отказ компонента или обрыв связи в котором приводит к нарушению работы всей системы. На рисунке 2 единичная точка отказа обозначена красным крестиком.
На рисунке 3 показана конфигурация в виде дублированной полевой шины, связывающей резервированный контроллер с узлами ввода/вывода. Каждый узел ввода/вывода снабжен двумя интерфейсными модулями. Если не считать сами модули ввода/вывода, которые резервируются редко, в данной конфигурации единичной точки отказа нет.
Рис. 3. Резервированная шина.Вообще, при построении отказоустойчивых АСУ ТП стараются, чтобы единичный отказ в любом компоненте (линии связи) не влиял на работу всей системы. В этом плане конфигурация в виде дублированной полевой шины является наиболее распространенным техническим решением.
На рисунке 4 показана конфигурация в виде оптоволоконного кольца. Контроллер и узлы ввода/вывода подключены к кольцу с помощью резервированных медных сегментов. Для состыковки медных сегментов сети с оптоволоконными применяются специальные конверторы среды передачи данных “медь<->оптоволокно” (OLM, Optical Link Module). Для каждого из стандартных протоколов можно выбрать соответствующий OLM.
Рис. 4. Одинарное оптоволоконное кольцо.Как и дублированная шина, оптоволоконное кольцо устойчиво к возникновению одного обрыва в любом его месте. Система такой обрыв вообще не заметит, и переключение на резервные интерфейсные и коммуникационные модули не произойдет. Более того, обрыв одного из двух медных сегментов, соединяющих узел с оптоволоконным кольцом, не приведет к потере связи с этим узлом. Однако второй обрыв кольца может привести к неработоспособности системы. В общем случае два обрыва кольца в диаметрально противоположных точках ведут к потере коммуникации с половиной подключенных узлов.
На рисунке 5 изображена конфигурация с двойным оптическим кольцом. В случае если в результате образования двух точек обрыва первичное кольцо выходит из строя, система переключается на вторичное кольцо. Очевидно, что такая архитектура сети является наиболее отказоустойчивой. На рисунке 5 пошагово изображен процесс деградации сети. Обратите внимание, сколько отказов система может перенести до того, как выйдет из строя.
Рис. 5. Резервированное оптоволоконное кольцо.[ http://kazanets.narod.ru/NT_PART1.htm]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > field bus
11 fieldbus
полевая шина
-
[Интент]
полевая магистраль по зарубежной терминологии
Имеет много терминов-синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и исполнительных органов. Магистрали рассчитаны на применение в машиностроении, химической промышленности, в системах автоматизации зданий, крупных установках, бытовых электронных системах, системах автомобильного оборудования, малых контрольно-измерительных и управляющих системах на основе встраиваемых микроЭВМ и т. п. Основными магистралями являются Bitbus, MIL STD-1553В. В настоящее время рабочими группами IEC (65С и SP-50) стандартизируются два основных типа МЛС: высокоскоростные и низкоскоростные, ориентированные на датчики.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]ЧТО ТАКОЕ FIELDВUS?
Так пишется оригинальный термин, который в русском переводе звучит как «промышленная сеть». Fieldbus — это не какой-то определенный протокол передачи данных и не тип сетевой архитектуры, этот термин не принадлежит ни одной отдельно взятой компании и обозначает скорее сферу применения, чем какую-либо конкретную сетевую технологию.
Давайте попробуем сформулировать лишь некоторые основные требования, которые можно предъявить к «идеальной» промышленной сети.
1. Производительность.
2. Предсказуемость времени доставки информации.
3. Помехоустойчивость.
4. Доступность и простота организации физического канала передачи данных.
5. Максимальный сервис для приложений верхнего уровня.
6. Минимальная стоимость устройств аппаратной реализации, особенно на уровне контроллеров.
7. Возможность получения «распределенного интеллекта», путем предоставления максимального доступа к каналу нескольким ведущим узлам.
8.Управляемость и самовосстановление в случае возникновения нештатных ситуаций.
[Сергей Гусев. Краткий экскурс в историю промышленных сетей]
Международный стандарт IEC 61158 “Fieldbus for use in Industrial Control Systems” («Промышленная управляющая сеть для применения в промышленных системах управления») определяет восемь независимых и несовместимых коммуникационных технологий, из которых FOUNDATION Fieldbus H1 и PROFIBUS PA стали в значительной степени преобладающими в различных отраслях промышленности.
Эти промышленные сети соответствуют требованиям стандарта IEC 61158 2, который устанавливает физический уровень так называемых промышленных сетей H1.
Основными требованиями к промышленным сетям H1 являются:
● передача данных и питание устройств нижнего уровня по одной витой паре;
● гибкость при проектировании различных топологий сети;
● совместимость всех полевых приборов;
● взрывобезопасность при установкево взрывоопасных зонах;
● распределение одной инфраструктуры на многочисленные сегменты.[Виктор Жданкин. Концепция FieldConnex® для промышленных сетей FOUNDATION Fieldbus H1 и PROFIBUS_PA: повышение производительности и снижение затрат. СТА 2/2009]
Термин полевая шина является дословным переводом английского термина fieldbus.
Термин промышленная сеть является более точным переводом и в настоящее время именно он используется в профессиональной технической литературе.Промышленная сеть — сеть передачи данных, связывающая различные датчики, исполнительные механизмы, промышленные контроллеры и используемая в промышленной автоматизации. Термин употребляется преимущественно в автоматизированной системе управления технологическими процессами (АСУТП).
Устройства используют сеть для:
- передачи данных, между датчиками, контроллерами и исполнительными механизмами;
- диагностики и удалённого конфигурирования датчиков и исполнительных механизмов;
- калибрования датчиков;
- питания датчиков и исполнительных механизмов;
- связи между датчиками, исполнительными механизмами, ПЛК и АСУ ТП верхнего уровня.
В промышленных сетях для передачи данных применяют:
- электрические линии;
- волоконно-оптические линии;
- беспроводную связь (радиомодемы и Wi-Fi).
Промышленные сети могут взаимодействовать с обычными компьютерными сетями, в частности использовать глобальную сеть Internet.
[ Википедия]
Главной функцией полевой шины является обеспечение сетевого взаимодействия между контроллерами и удаленной периферией (например, узлами ввода/вывода). Помимо этого, к полевой шине могут подключаться различные контрольно-измерительные приборы ( Field Devices), снабженные соответствующими сетевыми интерфейсами. Такие устройства часто называют интеллектуальными ( Intelligent Field Devices), так как они поддерживают высокоуровневые протоколы сетевого обмена.
Пример полевой шины представлен на рисунке 1.
Рис. 1. Полевая шина.Как уже было отмечено, существует множество стандартов полевых шин, наиболее распространенные из которых приведены ниже:
1. Profibus DP
2. Profibus PA
3. Foundation Fieldbus
4. Modbus RTU
5. HART
6. DeviceNet
Несмотря на нюансы реализации каждого из стандартов (скорость передачи данных, формат кадра, физическая среда), у них есть одна общая черта – используемый алгоритм сетевого обмена данными, основанный на классическом принципе Master-Slave или его небольших модификациях.
Современные полевые шины удовлетворяют строгим техническим требованиям, благодаря чему становится возможной их эксплуатация в тяжелых промышленных условиях. К этим требованиям относятся:- Детерминированность. Под этим подразумевается, что передача сообщения из одного узла сети в другой занимает строго фиксированный отрезок времени. Офисные сети, построенные по технологии Ethernet, - это отличный пример недетерминированной сети. Сам алгоритм доступа к разделяемой среде по методу CSMA/CD не определяет время, за которое кадр из одного узла сети будет передан другому, и, строго говоря, нет никаких гарантий, что кадр вообще дойдет до адресата. Для промышленных сетей это недопустимо. Время передачи сообщения должно быть ограничено и в общем случае, с учетом количества узлов, скорости передачи данных и длины сообщений, может быть заранее рассчитано.
- Поддержка больших расстояний. Это существенное требование, ведь расстояние между объектами управления может порой достигать нескольких километров. Применяемый протокол должен быть ориентирован на использование в сетях большой протяженности.
- Защита от электромагнитных наводок. Длинные линии в особенности подвержены пагубному влиянию электромагнитных помех, излучаемых различными электрическими агрегатами. Сильные помехи в линии могут исказить передаваемые данные до неузнаваемости. Для защиты от таких помех применяют специальные экранированные кабели, а также оптоволокно, которое, в силу световой природы информационного сигнала, вообще нечувствительно к электромагнитным наводкам. Кроме этого, в промышленных сетях должны использоваться специальные методы цифрового кодирования данных, препятствующие их искажению в процессе передачи или, по крайней мере, позволяющие эффективно детектировать искаженные данные принимающим узлом.
- Упрочненная механическая конструкция кабелей и соединителей. Здесь тоже нет ничего удивительного, если представить, в каких условиях зачастую приходиться прокладывать коммуникационные линии. Кабели и соединители должны быть прочными, долговечными и приспособленными для использования в самых тяжелых окружающих условиях (в том числе агрессивных атмосферах).
По типу физической среды полевые шины делятся на два типа:
-
Полевые шины, построенные на базе оптоволоконного кабеля.
Преимущества использования оптоволокна очевидны: возможность построения протяженных коммуникационных линий (протяженностью до 10 км и более); большая полоса пропускания; иммунитет к электромагнитным помехам; возможность прокладки во взрывоопасных зонах.
Недостатки: относительно высокая стоимость кабеля; сложность физического подключения и соединения кабелей. Эти работы должны выполняться квалифицированными специалистами. -
Полевые шины, построенные на базе медного кабеля.
Как правило, это двухпроводной кабель типа “витая пара” со специальной изоляцией и экранированием. Преимущества: удобоваримая цена; легкость прокладки и выполнения физических соединений. Недостатки: подвержен влиянию электромагнитных наводок; ограниченная протяженность кабельных линий; меньшая по сравнению с оптоволокном полоса пропускания.
Итак, перейдем к рассмотрению методов обеспечения отказоустойчивости коммуникационных сетей, применяемых на полевом уровне. При проектировании и реализации этот аспект становится ключевым, так как в большой степени определяет характеристики надежности всей системы управления в целом.
На рисунке 2 изображена базовая архитектура полевой шины – одиночная (нерезервированная). Шина связывает контроллер С1 и четыре узла ввода/вывода IO1-IO4. Очевидно, что такая архитектура наименее отказоустойчива, так как обрыв шины, в зависимости от его локализации, ведет к потере коммуникации с одним, несколькими или всеми узлами шины. В нашем случае в результате обрыва теряется связь с двумя узлами.
Рис. 2. Нерезервированная шина.Здесь важное значение имеет термин “единичная точка отказа” (SPOF, single point of failure). Под этим понимается место в системе, отказ компонента или обрыв связи в котором приводит к нарушению работы всей системы. На рисунке 2 единичная точка отказа обозначена красным крестиком.
На рисунке 3 показана конфигурация в виде дублированной полевой шины, связывающей резервированный контроллер с узлами ввода/вывода. Каждый узел ввода/вывода снабжен двумя интерфейсными модулями. Если не считать сами модули ввода/вывода, которые резервируются редко, в данной конфигурации единичной точки отказа нет.
Рис. 3. Резервированная шина.Вообще, при построении отказоустойчивых АСУ ТП стараются, чтобы единичный отказ в любом компоненте (линии связи) не влиял на работу всей системы. В этом плане конфигурация в виде дублированной полевой шины является наиболее распространенным техническим решением.
На рисунке 4 показана конфигурация в виде оптоволоконного кольца. Контроллер и узлы ввода/вывода подключены к кольцу с помощью резервированных медных сегментов. Для состыковки медных сегментов сети с оптоволоконными применяются специальные конверторы среды передачи данных “медь<->оптоволокно” (OLM, Optical Link Module). Для каждого из стандартных протоколов можно выбрать соответствующий OLM.
Рис. 4. Одинарное оптоволоконное кольцо.Как и дублированная шина, оптоволоконное кольцо устойчиво к возникновению одного обрыва в любом его месте. Система такой обрыв вообще не заметит, и переключение на резервные интерфейсные и коммуникационные модули не произойдет. Более того, обрыв одного из двух медных сегментов, соединяющих узел с оптоволоконным кольцом, не приведет к потере связи с этим узлом. Однако второй обрыв кольца может привести к неработоспособности системы. В общем случае два обрыва кольца в диаметрально противоположных точках ведут к потере коммуникации с половиной подключенных узлов.
На рисунке 5 изображена конфигурация с двойным оптическим кольцом. В случае если в результате образования двух точек обрыва первичное кольцо выходит из строя, система переключается на вторичное кольцо. Очевидно, что такая архитектура сети является наиболее отказоустойчивой. На рисунке 5 пошагово изображен процесс деградации сети. Обратите внимание, сколько отказов система может перенести до того, как выйдет из строя.
Рис. 5. Резервированное оптоволоконное кольцо.[ http://kazanets.narod.ru/NT_PART1.htm]
Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > fieldbus
12 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
13 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
14 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
15 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
16 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
17 défaillance forcve d'un systéme technologique
вынужденный отказ технологической системы
вынужденный отказ
Отказ технологической системы, вызванный нарушением регламентированных для этой системы условий производства.
[ ГОСТ 27.004-85]Тематики
- надежность, основные понятия
Обобщающие термины
Синонимы
EN
FR
Франко-русский словарь нормативно-технической терминологии > défaillance forcve d'un systéme technologique
18 forced failure of technological system
вынужденный отказ технологической системы
вынужденный отказ
Отказ технологической системы, вызванный нарушением регламентированных для этой системы условий производства.
[ ГОСТ 27.004-85]Тематики
- надежность, основные понятия
Обобщающие термины
Синонимы
EN
FR
Англо-русский словарь нормативно-технической терминологии > forced failure of technological system
19 défaillance inhérent d'un systém technologique
собственный отказ технологической системы
собственный отказ
Отказ технологической системы, вызванный нарушением работоспособного состояния ее элементов и (или) функциональных связей между ними.
[ ГОСТ 27.004-85]Тематики
- надежность, основные понятия
Обобщающие термины
Синонимы
EN
FR
Франко-русский словарь нормативно-технической терминологии > défaillance inhérent d'un systém technologique
20 disturbance
- расстройство
- разрыв (геол.)
- помехи
- помеха
- ошибка
- неисправность
- нарушение стационарного режима
- нарушение нормальной работы
- нарушение в питающей сети переменного тока
- дислокация (геол.)
- возмущение
- аварийное нарушение
возмущение
Воздействие извне на любой элемент (подсистему) системы управления, включая объект управления, затрудняющее, как правило, достижение цели управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
возмущение
Нарушение (обычно внезапное) режима объекта, вызванное отказами, отключениями отдельных элементов и т.п., приводящее к аварийному режиму его работы
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
Тематики
- автоматизация, основные понятия
- электротехника, основные понятия
EN
дислокация (геол.)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
нарушение в питающей сети переменного тока
Любое изменение питания электрической энергией, которое может вызвать неправильные условия эксплуатации нагрузки.1)
[ ГОСТ 27699-88]
В МЭК 62040-3 определено 10 нарушений в питающей сети:
- Перерыв электропитания ( power outage) более 10 мс,
- Колебания напряжения ( voltage fluctuations) менее 16 мс,
- Voltage transients (4.16ms),
- Пониженное напряжение ( under-voltage) постоянно,
- Перенапряжение ( over-voltage) постоянно,
- Lightning effects (sporadic <1ms),
- Импульсные перенапряжения (voltage surges) менее 4 мс,
- Нестабильность частоты (frequency fluctuations) от случая к случаю,
- Voltage bursts (periodic),
- Искажение синусоидальности кривой напряжения (voltage harmonics) постоянно.
EN
power line disturbances
The ten most frequent disturbances (IEC 62040-3):- Power outage (>10ms),
- Voltage fluctuations (<16ms),
- Voltage transients (4.16ms),
- Under-voltage (continuous),
- Over-voltage (continuous),
- Lightning effects (sporadic <1ms),
- Voltage surges(<4ms),
- Frequency fluctuations (sporadic),
- Voltage bursts (periodic),
- Voltage harmonics(continuous).
[http://www.upsonnet.com/UPS-Glossary/]
1) Лучше - вызвать неправильную работу нагрузки
[Интент]Недопустимые, нерекомендуемые
- неисправность электропитания
- неполадки в электросети
- неполадки питающей энергосети
- перебои в сети
- сбой питания
- сбой электропитания
- сбой электросети
- сбой электроснабжения
Тематики
Синонимы
EN
нарушение нормальной работы
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]
нарушение нормальной работы
-
[Интент]Предупреждающий светосигнал - Авиационный световой сигнал желтого цвета, предназначенный для информации членов экипажа самолета или вертолета о нарушениях нормальной работы отдельных агрегатов и систем, не создающих аварийной ситуации, требующих включения того или иного агрегата.
[ ГОСТ 21658-76]Пропускную способность предохранительных клапанов следует определять с учетом сопротивления звукоглушителя; его установка не должна вызывать нарушений нормальной работы предохранительных клапанов.
[ ГОСТ 24570-81]Выключатель считается выдержавшим испытание, если после испытания отсутствуют механические повреждения, приводящие к нарушению его нормальной работы...
[ ГОСТ 9098-78 ]
Тематики
EN
нарушение стационарного режима
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
неисправность
отказ в работе
Состояние машины, характеризующееся неспособностью выполнять заданную функцию, исключая случаи проведения профилактического технического обслуживания, других запланированных действий или недостаток внешних ресурсов (например, отключение энергоснабжения).
Примечание 1
Неисправность часто является результатом повреждения самой машины, однако она может иметь место и без повреждения.
Примечание 2
На практике термины «неисправность», «отказ» и «повреждение» часто используются как синонимы.
[ ГОСТ Р ИСО 12100-1:2007]
неисправность
Состояние оборудования, характеризуемое его неспособностью выполнять требуемую функцию, исключая профилактическое обслуживание или другие планово-предупредительные действия, а также исключая неспособность выполнять требуемую функцию из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является следствием отказа самого оборудования, но может существовать и без предварительного отказа.
[ГОСТ ЕН 1070-2003]
неисправность
Состояние технического объекта (элемента), характеризуемое его неспособностью выполнять требуемую функцию, исключая периоды профилактического технического обслуживания или другие планово-предупредительные действия, или в результате недостатка внешних ресурсов.
Примечания
1 Неисправность является часто следствием отказа самого технического объекта, но может существовать и без предварительного отказа.
2 Английский термин «fault» и его определение идентичны данному в МЭК 60050-191 (МЭС 191-05-01) [1]. В машиностроении чаще применяют французский термин «defaut» или немецкий термин «Fehler», чем термины «panne» и «Fehlzusstand», которые употребляют с этим определением.
[ ГОСТ Р ИСО 13849-1-2003]Тематики
EN
- abnormality
- abort
- abortion
- breakage
- breakdown
- bug
- defect
- disease
- disrepair
- disturbance
- fail
- failure
- failure occurrence
- fault
- faultiness
- fouling
- health problem
- layup
- malfunction
- problem
- shutdown
- trouble
DE
FR
ошибка
Расхождение между вычисленным, наблюденным или измеренным значением или условием и истинным, специфицированным или теоретически правильным значением или условием.
Примечание
Адаптировано из МЭС 191-05-24 путем исключения примечаний.
[ ГОСТ Р МЭК 61508-4-2007]
ошибка
1. В теории информации: отклонение воспринятой информации от переданной. В соответствии с характеристикой процесса восприятия и передачи информации различают: синтаксические (или структурные) О., вызываемые физическими ограничениями канала, сбоями в сборе информации и т.п.; семантические О., состоящие в непонимании получателем полученной им информации; прагматические, т.е. О. в определении ценности полученной информации при ее отборе для использования. 2. В экономико-математическом моделировании — элемент модели, отражающий суммарный эффект не учтенных в ней непосредственно (т.е. не признанных существенными) систематических и случайных факторов, воздействующих на экзогенные переменные (см. Возмущение, Помехи). 3. В математической статистике то же, что отклонение или разброс около истинного значения рассматриваемой случайной величины. Различаются О. случайные (их величина описывается законом распределения и при массовом повторении они обычно взаимно погашаются), и систематические, которые отражают воздействие некоторых неизвестных факторов; они либо имеют постоянную величину, либо изменяются в определенном направлении. Сочетание многих систематических ошибок может привести к формированию случайной ошибки. Есть также ошибки грубые, эксцессы, которые обычно исключаются из статистического исследования из-за своей нехарактерности для изучаемого процесса. В теории статистической проверки гипотез различаются: ошибка первого рода, если отклоняется истинная гипотеза и ошибка второго рода, если не отвергается неправильная гипотеза. То же: Погрешность • Некоторые виды статистических ошибок: Ошибка агрегирования [aggregation bias] - см. Агрегирование. Ошибка выборки [sample bias] - в выборочных методах возникает тогда, когда обнаруживается то, что в действительности отсутствует (например, в процессе наблюдения экономических явлений, при решении задач поиска). Ошибка наблюдения [observation bias] - в выборочных методах возникает тогда, когда пропускают то, что в действительности имеет место (например, при наблюдениии экономических явлений, в задачах поиска). Ошибки в прогнозировании [forecasting bias] - расхождения между данными прогноза и действительными (фактическими) данными. Закономерности О.п. изучаются математико-статистическими методами. Различаются четыре вида ошибок прогнозирования: исходных данных, модели прогноза, согласования, стратегии. Ошибки исходных данных связаны главным образом с неточностью экономических измерений, некачественностью выборки, искажением данных при их агрегировании и т.д. Ошибки модели прогноза возникают вследствие упрощения и несовершенства теоретических построений, экспертных оценок и т.д. Правильность модели прогноза (в том числе оценки ее параметров) проверяется ретроспективным расчетом, который можно сопоставить с действительным ходом исследуемого процесса. Однако и это не дает полной гарантии качества прогноза на будущее, так как условия могут измениться. Ошибки согласования часто происходят из-за того, что статистические данные в народном хозяйстве подготавливаются разными организациями, которые применяют различную методологию расчетов. Ошибки стратегии — результат, главным образом, неудачного выбора оптимистического или пессимистического вариантов прогноза. (См. Диапазон осуществимости прогноза).
[ http://slovar-lopatnikov.ru/]Тематики
- экономика
- электротехника, основные понятия
EN
помехи
Возмущения в канале связи, искажающие передаваемый сигнал.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
помехи
1. В теории информации — причина отклонений воспринятой информации от переданной по каналу связи источником этой информации. 2. В экономико-математическом моделировании П. часто рассматриваются как элемент модели, условно учитывающий вероятностное воздействие не включенных в модель величин, суммирующий эти случайные воздействия в виде дополнительного члена уравнений модели, т.е. как синоним терминов «ошибка», «остаток». Точнее, однако, определять П. как источник, причину ошибок модели. Элемент П. в уравнении появляется тогда, когда случайные воздействия на экономический объект не удается учесть непосредственно (а иногда, если это просто нецелесообразно из-за чрезмерного усложнения расчетов). Обозначается греческой буквой e или w. При записи модели в векторной форме e или w называют вектором помех.
[ http://slovar-lopatnikov.ru/]Тематики
EN
разрыв (геол.)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
3.1.45 помеха (disturbance): Влияющая величина, имеющая значения в пределах, определенных в настоящем стандарте, но вне номинального эксплуатационного режима весоизмерительного датчика.
Источник: ГОСТ Р 8.726-2010: Государственная система обеспечения единства измерений. Датчики весоизмерительные. Общие технические требования. Методы испытаний оригинал документа
3.8 помеха (disturbance): См. 3.10.
Источник: ГОСТ Р 51317.1.5-2009: Совместимость технических средств электромагнитная. Воздействия электромагнитные большой мощности на системы гражданского назначения. Основные положения оригинал документа
4.8 возмущение (disturbance): Значения влияющих величин, которые выходят за пределы нормированных рабочих условий.
Источник: ГОСТ Р ЕН 1434-1-2011: Теплосчетчики. Часть 1. Общие требования
Англо-русский словарь нормативно-технической терминологии > disturbance
СтраницыСм. также в других словарях:
СИСТЕМЫ — 54. СИСТЕМЫ совокупность элементов, предназначенных для выполнения заданных функций. Источник: ПНАЭ Г 05 035 94: Учет внешних воздействий природного и техногенного происхождения на ядерно и радиационно опасн … Словарь-справочник терминов нормативно-технической документации
Отказ в обслуживании — DoS атака (от англ. Denial of Service, отказ в обслуживании) и DDoS атака (от англ. Distributed Denial of Service, распределённая атака типа «отказ в обслуживании») атака на вычислительную систему с целью довести её до отказа, то есть, создание … Википедия
Отказ от обслуживания — DoS атака (от англ. Denial of Service, отказ в обслуживании) и DDoS атака (от англ. Distributed Denial of Service, распределённая атака типа «отказ в обслуживании») атака на вычислительную систему с целью довести её до отказа, то есть, создание … Википедия
ОТКАЗ ОТ УВЕДОМЛЕНИЯ — WAIVER OF NOTICEТермин имеет следующие значения1. См. ОТКАЗ ОТ ПРОТЕСТА.2. Корпоративные собрания по законам штатов бывают двух основных типов. Заседания директоров включают регулярные (очередные) и специальные (чрезвычайные) заседания (собрания) … Энциклопедия банковского дела и финансов
ГОСТ Р МЭК 61513-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования — Терминология ГОСТ Р МЭК 61513 2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования оригинал документа: [МАГАТЭ 50 SG D8] Примечание 1 См. также «система, важная для безопасности», «класс систем контроля… … Словарь-справочник терминов нормативно-технической документации
ГОСТ 19472-88: Система автоматизированной телефонной связи общегосударственная. Термины и определения — Терминология ГОСТ 19472 88: Система автоматизированной телефонной связи общегосударственная. Термины и определения оригинал документа: Circuit group telephone network traffic capacity 68 Определения термина из разных документов: Circuit group… … Словарь-справочник терминов нормативно-технической документации
Р 50.1.048-2004: Информационно-телекоммуникационные игровые системы. Термины и определения — Терминология Р 50.1.048 2004: Информационно телекоммуникационные игровые системы. Термины и определения: 2.3.25 адаптивное сопровождение: Изменение программного продукта после поставки, обеспечивающее его работоспособное состояние в измененных… … Словарь-справочник терминов нормативно-технической документации
РД 25.03.001-2002: Системы охраны и безопасности объектов. Термины и определения — Терминология РД 25.03.001 2002: Системы охраны и безопасности объектов. Термины и определения: 2.36.8 аварийное освещение (на охраняемом объекте): Действующее при аварии на объекте только в момент отключения основного освещение, позволяющее… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 52551-2006: Системы охраны и безопасности. Термины и определения — Терминология ГОСТ Р 52551 2006: Системы охраны и безопасности. Термины и определения оригинал документа: 2.2.1 безопасность: Состояние защищенности жизненно важных интересов личности, общества и государства от внутренних и внешних угроз (по… … Словарь-справочник терминов нормативно-технической документации
средняя наработка на отказ — 01.04.29 средняя наработка на отказ [ mean time between failures; MTBF]: Суммарная наработка в часах до отказа компонента, сборки или системы. Примечание 1 Определение на основе определения 191 12 08 по МЭК 60050 191 Примечание 2 MTBF является… … Словарь-справочник терминов нормативно-технической документации
РМ 4-239-91: Системы автоматизации. Словарь-справочник по терминам. Пособие к СНиП 3.05.07-85 — Терминология РМ 4 239 91: Системы автоматизации. Словарь справочник по терминам. Пособие к СНиП 3.05.07 85: 4.2. АВТОМАТИЗАЦИЯ 1. Внедрение автоматических средств для реализации процессов СТИСО 2382/1 Определения термина из разных документов:… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на русский
с русского на все языки- С русского на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский